Fig. 1
Download original image
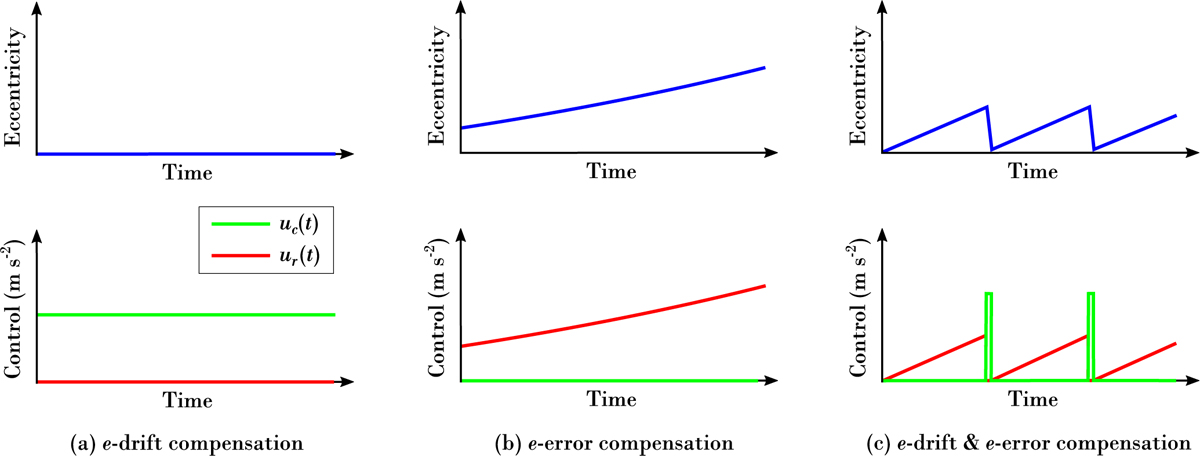
Three methods for mitigating the secular and long-period eccentricity vector drift. The panels on the left ((a) e-drift compensation) show the approach for compensating for the eccentricity vector drift of the chief using continuous control. The center panels ((b) e-error compensation) show the method that accepts the small eccentricity error and compensates for the relative perturbing acceleration of the deputy via continuous control. The panels on the right ((c) e-drift and e-error compensation) show the hybrid approach. The top and bottom panels for each approach show the time histories of the eccentricity and control accelerations, respectively.
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.