Fig. 1
Download original image
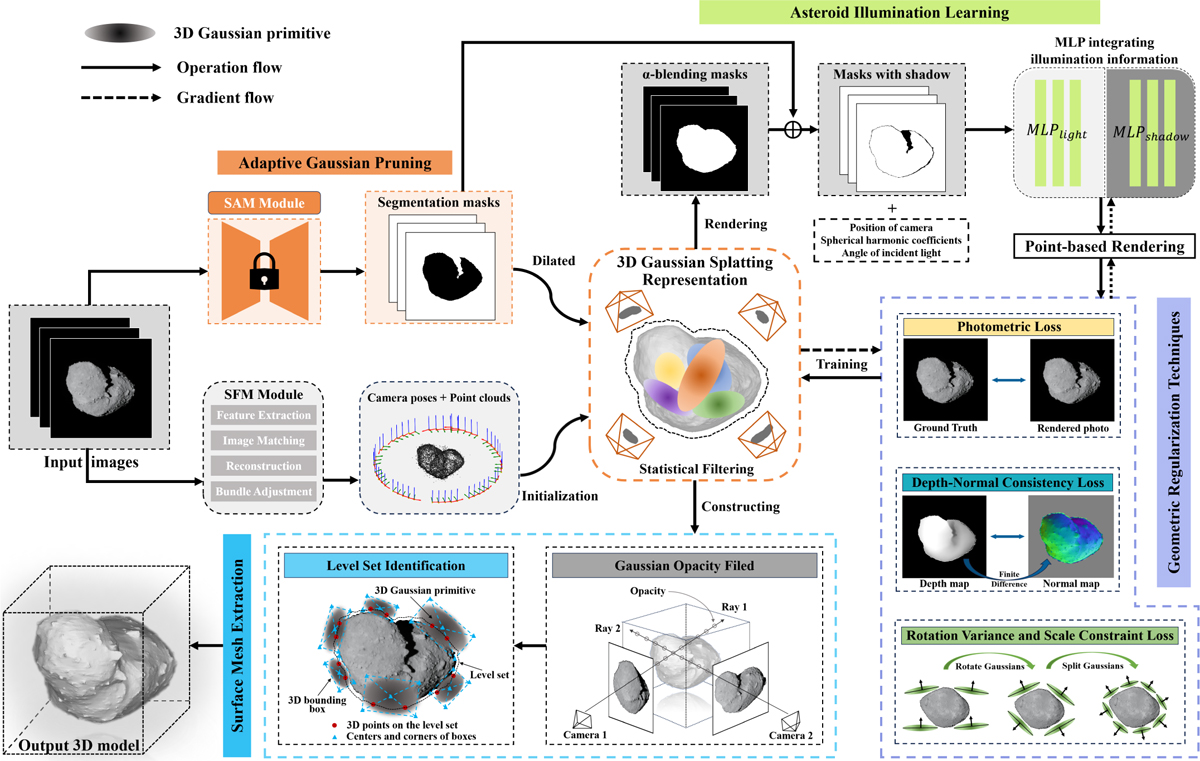
Framework of Asteroid-GS. The input to the framework is multi-view images captured by the spacecraft. We initialize the 3D Gaussian scene using the sparse point cloud generated by SfM. We dilate the masks segmented from SAM alongside statistical filtering to achieve adaptive Gaussian pruning. The MLPs integrated with illumination information are employed to predict the colors of 3D Gaussian primitives in well-lit and shadowed areas. Geometric regularization techniques are introduced to enhance the accuracy and robustness of reconstruction. We construct the Gaussian opacity field and identify the level set before extracting the surface mesh.
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.