| Issue |
A&A
Volume 705, January 2026
|
|
|---|---|---|
| Article Number | A82 | |
| Number of page(s) | 13 | |
| Section | Planets, planetary systems, and small bodies | |
| DOI | https://doi.org/10.1051/0004-6361/202555897 | |
| Published online | 13 January 2026 | |
Excitation of planetary inclinations via dynamical bifurcations driven by misaligned disks
1
School of Astronautics, Beihang University,
Beijing
102206,
PR
China
2
Key Laboratory of Spacecraft Design Optimization and Dynamic Simulation Technology, Ministry of Education,
Beijing
102206,
PR
China
★ Corresponding author: This email address is being protected from spambots. You need JavaScript enabled to view it.
Received:
11
June
2025
Accepted:
14
November
2025
Abstract
Context. Primordial misalignments between protoplanetary disks and their host stars’ spin axes have been proposed to be important origins of the widespread stellar obliquities observed in exoplanets. Recent works have further revealed nontrivial and rich dynamics in planetary systems driven by misaligned disks. These dynamics may have played critical roles in sculpting the architectures of exoplanetary systems and have left detectable imprints.
Aims. We present a comprehensive analytical study of the dynamics driven by misaligned disks given its potential importance in explaining the dynamical evolution of exoplanetary systems at their early stages.
Methods. We developed an analytical averaged model that includes the disk’s full-space gravity, stellar quadrupole moment, and planetary interactions. We then investigated equilibria, their stability, and bifurcations based on different system configurations.
Results. We demonstrate that the dynamical bifurcation-induced effect—which generates large-amplitude librating mutual inclinations through separatrix-crossing behaviors at a saddle-center bifurcation—stems from the nonlinear inclination dependence of disk gravity. Crucially, the linear disk gravity model (which predicts constant nodal precession) adopted in prior studies fails to capture this effect. The introduction of an outer perturbing body in a hierarchical configuration suppresses the bifurcation-induced effect, quantified by a dimensionless parameter, ϵ⋆p (the stellar oblateness relative to external perturbation): as ϵ⋆p → ∞, ψ⋆0,crit → 44.6°; and as ϵ⋆p → 1, ψ⋆0,crit → 90°. Bifurcations are entirely inhibited when ϵ⋆p < 1. This mechanism also operates in compact multi-planet systems. We establish an approximate criterion to roughly distinguish their evolution patterns. Statistical analysis of Kepler multi-planet systems confirms that regimes producing coplanar multi-planet systems with high stellar obliquities are rare; this is consistent with the observed low obliquities.
Key words: celestial mechanics / planets and satellites: dynamical evolution and stability / planet–disk interactions / planet–star interactions
© The Authors 2026
 Open Access article, published by EDP Sciences, under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
Open Access article, published by EDP Sciences, under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
This article is published in open access under the Subscribe to Open model. This email address is being protected from spambots. You need JavaScript enabled to view it. to support open access publication.
1 Introduction
Planetary orbits within a system are traditionally expected to be coplanar and closely aligned with their host stars’ spin axes, as they are believed to have formed from the same protoplanetary disk. This assumption is supported by the fact that in the Solar System, the Sun’s obliquity is only about 7°. However, observations of exoplanets reveal a wide range of stellar obliquities, with spin-orbit angles varying from 0 to nearly 180° (Winn et al. 2010). These obliquities, primarily measured using techniques such as the Rossiter-McLaughlin effect (Rossiter 1924; McLaughlin 1924), provide crucial insights into the diverse evolutionary histories of planetary systems.
The vast majority of stellar obliquity measurements have focused on close-in giant planets, particularly hot Jupiters (HJs). These observations commonly reveal significant spin-orbit misalignments in systems with HJs orbiting hot stars. Such misalignments have typically been interpreted as the natural outcomes of the formation of HJs through high-eccentricity migration processes. During these processes, giant planets originally located at large orbital distances are driven into highly eccentric orbits, which then evolve into tighter, tidally locked orbits through tidal interactions. The initial orbital excitations are believed to be triggered by a variety of dynamical processes, including the von Zeipel–Lidov–Kozai (ZLK) mechanism (Wu & Murray 2003; Fabrycky & Tremaine 2007; Naoz et al. 2011), secular interactions (Wu & Lithwick 2011), and planet-planet scattering (Ford & Rasio 2008; Nagasawa et al. 2008; Beaugé & Nesvornỳ 2012).
However, recent findings have shown that relying on these traditional mechanisms as the predominant pathways for HJ formulation is problematic for several reasons: (1) The occurrence rate of initially highly inclined outer massive companions, necessary to trigger the ZLK effect, is inefficient to produce the observed HJ population. (2) The scarcity of proto-HJs found on highly eccentric orbits challenges the high-eccentricity migration hypothesis (Dawson et al. 2014). (3) The isotropic distribution of stellar obliquities for misaligned HJs, revealed via a hierarchical Bayesian analysis (Dong & Foreman-Mackey 2023), disfavors the mechanisms that would result in a specific distribution.
Alternative HJ formation channels involve more quiescent processes, such as in situ formation and disk migration, which typically result in closely aligned HJs. However, to account for the high stellar obliquities observed, these mechanisms require the consideration of additional factors, notably the primordial misalignment between the protoplanetary disk and the host star’s spin axis (Batygin 2012). Furthermore, the recently proposed coplanar high-eccentricity migration pathway, which has been suggested as a likely dominant formation mechanism for HJs based on an analysis of their giant companions, also requires primordial origins for the observed obliquity distribution (Zink & Howard 2023). Therefore, it appears that primordial misalignments played a significant role in shaping the orbital configurations of HJs.
In addition to these indirect arguments, direct observations provide compelling evidence of disk misalignment. Approximately 33% (5 out of 15) of observed protoplanetary disks show misalignment with their host pre-main-sequence stars (Davies 2019), while about 19% (6 out of 31) of debris disks exhibit similar misalignments (Hurt & MacGregor 2023). A recent study also revealed a large misalignment in the protoplanetary disk around a young star (Barber et al. 2024), and observations of circular binary protoplanetary disks in polar configurations further underscore these findings (Kennedy et al. 2019). Although the samples are limited—partly due to the challenges in resolving stellar orientations in the presence of protoplanetary disks—the existing observations suggest that a moderate proportion of these disks could be significantly misaligned.
Theoretically, primordial misalignments can be generated through several mechanisms. Chaotic accretion, characterized by irregular material inflow, typically results in misalignments of up to 20° (Bate et al. 2010; Fielding et al. 2015). Magnetic warping, driven by interactions between the disk’s magnetic field and the star, leads to moderate misalignments (Lai et al. 2011; Foucart & Lai 2011). Gravitational torques from a distant inclined stellar companion, on the other hand, can produce a broad range of stellar obliquities, typically spanning from 60° to 180° (Batygin 2012; Spalding & Batygin 2015; Zanazzi & Lai 2018). Despite these well-studied mechanisms, it remains uncertain which process—or combination thereof—primarily accounts for the star-disk misalignments observed in practice.
Several recent studies have invoked these primordial misalignments to explain unique orbital configurations in multi-planet systems. For instance, the K2-290A system, which features two coplanar planets on retrograde orbits with a stellar obliquity of ψ⋆ = 124° ± 6°, is proposed to have originated from a primordial disk misalignment driven by its stellar companion, K2-290B (Hjorth et al. 2021). Similarly, the near-perpendicular (likely retrograde) inner-outer orbits of HD 3167 have been attributed to dynamical evolution driven by a polar misaligned disk (Fu & Wang 2024). The predominantly low obliquities in Kepler’s compact multi-planet systems may reflect bifurcated evolutionary pathways driven by misaligned disks, if such primordial misalignments are common (Fu et al. 2025). Furthermore, combining high-eccentricity migration with primordial disk misalignments can reproduce a distinct population of HJs on perpendicular orbits (Vick et al. 2023).
Critically, the dynamical bifurcation-induced effect discovered by Fu & Wang (2024)—a saddle-center bifurcation during disk dispersal that induces separatrix-crossing behaviors and thus large-amplitude orbital librations—may have broadly influenced early dynamical evolution in systems with misaligned protoplanetary disks, thereby sculpting their architectures. While several previous studies have explored the early dynamics of planetary systems taking planet-disk interactions into account, they typically assume that the inner region of the disk has already dissipated (Petrovich et al. 2020; Millholland & Batygin 2019; Su & Lai 2020), or they employ a simplified gravitational model of the disk that is only valid when planets lie within the disk plane (Spalding & Millholland 2020; Zanazzi & Lai 2018). In the former case, the secular effect of the outer disk’s gravity resembles that of an external perturbing body, with its strength decaying as the disk disperses. In the latter case, Spalding & Millholland (2020) adopted a linear gravitational model of the disk that describes a constant orbit precession. In contrast, Fu & Wang (2024) and Fu et al. (2025) applied a full-space disk model that captures nonlinear gravitational effects, enabling identification of dynamical bifurcations.
In this paper, we demonstrate that the equilibrium bifurcations arise from the sin−1 I dependence of the disk-induced nodal regression for orbits inclined to the disk plane. Conversely, the linear gravity model—valid only for orbits lying within the disk plane and assuming constant nodal regression—obscures this effect and predicts a qualitatively distinct dynamical evolution. Then, we systematically analyze equilibrium stability under the full-space disk gravity model and examine how perturbations from additional planets in hierarchical and compact systems modify these dynamics.
Our study does not address the formation channels of primordial misalignments (e.g., chaotic accretion, magnetic warping, or binary torques). Instead, we focus exclusively on the planetary dynamics following their establishment.
This paper is structured as follows: Section 2 presents the secular dynamical model. Section 3 details the origin of equilibrium bifurcations and their stability in a simplified system. Section 4 extends the analysis to hierarchical three-body systems. Section 5 examines compact multi-planet systems with low-mass planets. We conclude with a discussion and summary in Section 6.
2 Secular dynamical model
We considered a multi-planet system featuring a fast-rotating host star (orientation along ![Mathematical equation: $\[\hat{\boldsymbol{s}}_{\star}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq1.png) ) and a misaligned protoplanetary disk (orientation along
) and a misaligned protoplanetary disk (orientation along ![Mathematical equation: $\[\hat{\boldsymbol{l}}_{\mathrm{d}}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq2.png) ), as shown in Fig. 1. Here we use a two-planet system with planetary masses m1 and m2 and semimajor axes a1 and a2 (a1 < a2) as an example. The Hamiltonian function incorporates the stellar oblateness, the disk’s gravity, and the gravitational interactions between the planets, all of which govern the planetary orbital evolution; it is presented in (Fu & Wang 2024; Fu et al. 2025)
), as shown in Fig. 1. Here we use a two-planet system with planetary masses m1 and m2 and semimajor axes a1 and a2 (a1 < a2) as an example. The Hamiltonian function incorporates the stellar oblateness, the disk’s gravity, and the gravitational interactions between the planets, all of which govern the planetary orbital evolution; it is presented in (Fu & Wang 2024; Fu et al. 2025)
![Mathematical equation: $\[\begin{aligned}\mathcal{H} & =\sum_{i=1,2} \mathcal{H}_{\mathrm{k}, i}+\Phi_{\star, i}+\Phi_{\mathrm{d}, i}+\Phi_{12} \\& =\sum_{i=1,2}-\frac{G m_i m_{\star}}{2 a_i}+\frac{\phi_{\star, i}}{6\left(1-e_i^2\right)^{3 / 2}}\left[1-3\left(\hat{\boldsymbol{s}}_{\star} \cdot \hat{\boldsymbol{l}}_i\right)^2\right] \\& +\phi_{\mathrm{d}, i}\left\{\frac{\pi}{8} e_i^2+\frac{\sqrt{1-e_i^2}}{S_i}\left[S_i^2+\frac{e_i^2}{2}\left(\hat{\boldsymbol{l}}_{\mathrm{d}} \cdot \hat{\boldsymbol{e}}_i\right)^2\right]\right. \\& \left.-\frac{\pi}{32}\left[\left(4-3 e_i^2\right) S_i^2+6 e_i^2\left(\hat{\boldsymbol{l}}_{\mathrm{d}} \cdot \hat{\boldsymbol{e}}_i\right)^2\right]\right\} \\& +\frac{\phi_{12}}{2}\left[5\left(\boldsymbol{e}_1 \cdot \hat{\boldsymbol{l}}_2\right)^2-\left(\boldsymbol{l}_1 \cdot \hat{\boldsymbol{l}}_2\right)^2+1 / 3-2 e_1^2\right],\end{aligned}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq3.png) (1)
(1)
where ℋk,i represents the Keplerian part for planet i that does not contribute to the secular evolution, Φ⋆,i arises from the stellar oblateness, Φd,i arises from the disk’s gravity, and Φ12 arises from the mutual gravitational interactions between the two planets. These perturbing potentials are formed in terms of the vectorial elements, the eccentricity vector ![Mathematical equation: $\[\boldsymbol{e}_{i}=e_{i} \hat{\boldsymbol{e}}_{i}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq4.png) and the normalized orbit angular momentum
and the normalized orbit angular momentum ![Mathematical equation: $\[\boldsymbol{l}_{i}=\sqrt{1-e_{i}^{2}} \hat{\boldsymbol{l}}_{i}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq5.png) . In Eq. (1),
. In Eq. (1),
![Mathematical equation: $\[\phi_{\star, i}=\frac{3 G m_{\star} m_i J_2 R_{\star}^2}{2 a_i^3},\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq6.png) (2)
(2)
![Mathematical equation: $\[\phi_{\mathrm{d}, i}=2 \pi m_i G \Sigma_0 a_0,\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq7.png) (3)
(3)
![Mathematical equation: $\[\phi_{12}=\frac{3 G m_1 m_2 a_1^2}{4 a_2^3\left(1-e_2^2\right)^{3 / 2}},\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq8.png) (4)
(4)
and
![Mathematical equation: $\[S_i=\sqrt{1-\left(\hat{\boldsymbol{l}}_{\mathrm{d}} \cdot \hat{\boldsymbol{l}}_i\right)^2}=\sin~ \boldsymbol{l}_i.\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq14.png) (5)
(5)
where G is the gravitational constant, m⋆ and R⋆ are the mass and radius of the central star, J2 is its second zonal gravity coefficient, Σ0 is the disk surface density at radius a0, and Ii is the orbit inclination relative to the disk plane.
The equations of motion in terms of l and e can be obtained by substituting the Hamiltonian (Eq. (1)) into the Lagrange planetary equations (Wang & Fu 2020):
![Mathematical equation: $\[\frac{\mathrm{d} \boldsymbol{l}_i}{\mathrm{~d} t}=-\frac{1}{L_i}\left(\boldsymbol{l}_i \times \nabla_{l_i} \Phi+\boldsymbol{e} \times \nabla_{e_i} \Phi\right),\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq15.png) (6)
(6)
![Mathematical equation: $\[\frac{\mathrm{d} \boldsymbol{e}_i}{\mathrm{~d} t}=-\frac{1}{L_i}\left(\boldsymbol{e}_i \times \nabla_{l_i} \Phi+\boldsymbol{l}_i \times \nabla_{\boldsymbol{e}_i} \Phi\right),\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq16.png) (7)
(7)
where ![Mathematical equation: $\[L_{i}=m_{i} \sqrt{G m_{\star} a_{i}}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq17.png) is the magnitude of the orbital angular momentum.
is the magnitude of the orbital angular momentum.
In Eq. (1), the planetary interaction potential (Φ12) is derived via multipole expansion, which assumes a hierarchical orbital configuration (i.e., a1 ≪ a2). However, if the orbits are compact, this approximation becomes inadequate. Instead, the interaction potential can be modeled through the Laplace-Lagrange theory by assuming small eccentricities and inclinations. The lowest-order secular potential is given by
![Mathematical equation: $\[\Phi_{12}^{\prime}=-\frac{\phi_{12}^{\prime}}{2}\left(\hat{\boldsymbol{l}}_1 \cdot \hat{\boldsymbol{l}}_2\right)^2,\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq18.png) (8)
(8)
where
![Mathematical equation: $\[\phi_{12}^{\prime}=\frac{G m_1 m_2 a_1}{4 a_2^2} b_{3 / 2}^{(1)}\left(\frac{a_1}{a_2}\right).\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq19.png) (9)
(9)
Here, ![Mathematical equation: $\[b_{3 / 2}^{(1)}(\alpha)\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq20.png) is the Laplace coefficient, given by
is the Laplace coefficient, given by
![Mathematical equation: $\[b_{3 / 2}^{(1)}(\alpha)=\frac{1}{\pi} \int_0^{2 \pi} \frac{\cos~ \theta}{\left(1-2 \alpha ~\cos~ \theta+\alpha^2\right)^{3 / 2}} \mathrm{~d} \theta.\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq21.png) (10)
(10)
In order to describe the gravity of the disk over the entire space, we derived the secular potential of the disk (Φd,i) in Eq. (1) using the thin disk model (Cuddeford 1993; Schulz 2012). To further analyze how the disk’s gravity drives precession in a planetary orbit, we considered the case of a circular orbit (e = 0). By substituting Φd,i from Eq. (1) into Eq. (6) with ei = 0, we obtain
![Mathematical equation: $\[\dot{\Omega} \approx-\frac{2 \pi G \Sigma_{\mathrm{a}}}{n a~(\sin~ I+\beta)}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq22.png) (11)
(11)
where β is the softening parameter, and I and Ω are the planet’s inclination and longitude of the ascending node relative to the disk plane, respectively. This result is consistent with the well-known result that the nodal precession has a I−1 dependence of the leading term (Ward 1981). Given this explicit inclination dependence, we refer to this as the nonlinear model.
In contrast, several previous studies have adopted a thick-disk model – derived by using Laplace-Lagrange theory – to describe the disk’s gravity near the disk plane. This model predicts a constant nodal precession rate, given by
![Mathematical equation: $\[\dot{\Omega} \simeq-\frac{\pi G \Sigma_a}{n a h},\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq23.png) (12)
(12)
where h is the disk aspect ratio h = H/r (H is the disk scale height). This version of the disk model is valid only when the planet lies within the disk plane, i.e., ![Mathematical equation: $\[\left|\hat{\boldsymbol{l}}_{i} \times \hat{\boldsymbol{l}}_{\mathrm{d}}\right| \ll h \ll 1\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq24.png) (Ward 1981; Zanazzi & Lai 2018). Since Eq. (12) results from a linearized treatment of the perturbing potential, we refer to this as the linear model.
(Ward 1981; Zanazzi & Lai 2018). Since Eq. (12) results from a linearized treatment of the perturbing potential, we refer to this as the linear model.
In summary, Eq. (11) follows from the thin-disk gravitational potential (Φd,i) in Eq. (1), which is valid across the physical domain. Equation (12), on the other hand, is based on a thick-disk potential that has been linearized under the assumption of small inclinations. We find that when the softening scale is set to β = h and the inclination I is small, the precession rate from the thin-disk model (Eq. (11)) closely matches that of the thick-disk model (Eq. (12)). This indicates that the thin-disk approximation with appropriate softening provides a reasonable description of gravitational effects across the entire spatial domain – even for planets near the disk plane. Conversely, applying the linearized model (Eq. (12)) to inclined orbits fails to accurately capture the secular evolution, as it neglects the critical nonlinear factor sin−1 I, as will be demonstrated in the following section.
The surface density of the disk is assumed to follow a Mestel disk profile (Mestel 1963):
![Mathematical equation: $\[\Sigma(r)=\Sigma_0 \frac{r_0}{r},\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq25.png) (13)
(13)
where Σ(r) is the disk’s surface density at radius r. The disk’s mass is then
![Mathematical equation: $\[m_{\mathrm{d}}=\int_{r_{\text {in}}}^{r_{\text {out}}} 2 \pi r \Sigma(r) \mathrm{d} r \simeq 2 \pi \Sigma_{\text {out}} r_{\text {out}}^2,\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq26.png) (14)
(14)
where rin and rout are the inner and outer truncation radii of the disk, assuming rin ≪ rout.
If the disk evolves homogeneously as assumed in many previous studies (Batygin & Adams 2013; Lai 2014), the surface density, Σ(r, t), evolves in time according to
![Mathematical equation: $\[\Sigma(r, t)=\frac{\Sigma_r(0)}{\left(1+t / \tau_{\mathrm{d}}\right)^{3 / 2}},\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq27.png) (15)
(15)
where τd is the timescale of the disk’s dissipation. However, realistic protoplanetary disks can evolve in a nonhomologous way due to photoevaporation. After the characteristic time τw, when the photo-evaporative mass-loss rate becomes comparable to viscous accretion rate at the critical photoevaporation radius rc, photoevaporation starves the inner region of the disk (r < rc) from resupply by the outer disk’s viscous evolution (Alexander et al. 2006, 2014; Zanazzi & Lai 2018). This leads to a rapid dissipation of the inner disk over a timescale τv,in ≪ τd, while the outer disk continues to evolve over τv,out = τd.
Assuming both the inner and outer disks follow a Mestel disk’s profile, the disk’s surface density evolution can be parameterized by (Zanazzi & Lai 2018)
![Mathematical equation: $\[\Sigma(r, t)= \begin{cases}\Sigma_{\mathrm{c}}(t)\left(r_{\mathrm{c}} / r\right) & r_{\text {in }}<r<r_{\mathrm{c}} \\ \Sigma_{\text {out }}(t)\left(r_{\text {out }} / r\right) & r_{\mathrm{c}}<r<r_{\text {out }},\end{cases}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq28.png) (16)
(16)
where
![Mathematical equation: $\[\left\{\begin{array}{l}\Sigma_{\mathrm{c}}(t)=\Sigma_{\mathrm{c}}(0) /\left(1+t / \tau_{\mathrm{v}, \text {in}}\right)^{3 / 2} \\\Sigma_{\text {out}}(t)=\Sigma_{\text {out }}(0) /\left(1+t / \tau_{\mathrm{v}, \text {out}}\right)^{3 / 2}.\end{array}\right.\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq29.png) (17)
(17)
Owing to their distinct surface density profiles, the gravitational fields of the inner and outer disks must be computed separately.
In this study, we assumed that orbits lie within the inner region of the disk with rin ≪ r ≪ rc. As a result, the potential of the inner disk has the same form as the expression Φd,i given in Eq. (1). The potential of the outer disk resembles that of an outer distant perturbing body (Zanazzi & Lai 2018; Fu & Wang 2024):
![Mathematical equation: $\[\Phi_{\mathrm{dout}, i}=\frac{\phi_{\mathrm{dout}, \mathrm{i}}}{2}\left[5\left(\boldsymbol{e}_i \cdot \hat{\boldsymbol{l}}_{\mathrm{d}}\right)^2-\left(\boldsymbol{l}_i \cdot \hat{\boldsymbol{l}}_{\mathrm{d}}\right)^2+1 / 3-2 e_i^2\right],\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq30.png) (18)
(18)
where
![Mathematical equation: $\[\phi_{\mathrm{dout}, i}=\frac{3 \pi G m_i \Sigma_{\mathrm{out}} r_{\mathrm{out}} a_i^2}{4 r_{\mathrm{c}}^2}.\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq31.png) (19)
(19)
Adding this potential to Eq. (1), the contribution of the outer disk can be included. However, for r ≪ rc, the perturbation from the outer disk becomes negligible compared to those from stellar oblateness and the inner disk. We therefore neglected this term in our initial analysis.
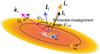 |
Fig. 1 Geometric illustration of a multi-planet system with a misaligned protoplanetary disk. The disk’s angular momentum orientation is denoted by the unit vector |
![Mathematical equation: $\[\hat{\boldsymbol{l}}_{\mathrm{d}}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq9.png)
![Mathematical equation: $\[\hat{\boldsymbol{s}}_{\star}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq10.png)
![Mathematical equation: $\[\hat{\boldsymbol{l}}_{\mathrm{d}}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq11.png)
![Mathematical equation: $\[\hat{\boldsymbol{s}}_{\star}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq12.png)
![Mathematical equation: $\[\hat{\boldsymbol{s}}_{\star}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq13.png)
3 Dynamical bifurcation-induced effect
In this section, we revisit the fundamental mechanism driven by misaligned disks and stellar oblateness. To facilitate an analytical understanding, we initially consider a simplified model comprising a single planet and assume a homogeneous evolution of the disk.
3.1 Equilibria and bifurcations
Planets initially embedded within the disk typically have nearly circular orbits as a result of the disk’s damping forces. Moreover, the condition e = 0 represents an equilibrium state that is independent of other orbital elements. Consequently, the eccentricity evolution can be excluded from our initial analysis.
For a one-planet system under the assumptions of circular orbits and homologous disk evolution, the secular perturbing potential reduces to
![Mathematical equation: $\[\Phi_{\mathrm{circ}}=-\frac{\phi_{\star, 1}}{2}\left(\boldsymbol{l}_1 \cdot \hat{\boldsymbol{s}}_{\star}\right)^2+\phi_{\mathrm{d}, 1} S_1\left(1-\frac{\pi}{8} S_1\right).\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq32.png) (20)
(20)
This system preserves two integrals of motion: the Hamiltonian (or Φcirc) and the magnitude of the normalized angular momentum (|l1| = 1), rendering the system integrable. Consequently, the equations of motion can be analytically solved, although obtaining explicit expressions for the solutions may prove challenging. Alternatively, the dynamics can be characterized through an examination of the phase portraits. The geometry of the phase space, determined by the equilibria and their stability, along with bifurcations with system parameters, provide valuable insights into the behavior of the system.
In the circular problem, the equilibria can be obtained by ![Mathematical equation: $\[\dot{\boldsymbol{l}}_{1}=0\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq33.png) , where
, where
![Mathematical equation: $\[\dot{\boldsymbol{l}}_1=\left(\boldsymbol{l}_1 \cdot \hat{\boldsymbol{s}}_{\star}\right) \hat{\boldsymbol{s}}_{\star} \times \boldsymbol{l}_1+\frac{1}{\epsilon_{\star \mathrm{d}}} \frac{1}{S_1}\left(1-\frac{\pi}{4} S_1\right)\left(\hat{\boldsymbol{l}}_{\mathrm{dk}} \cdot \hat{\boldsymbol{l}}_1\right) \hat{\boldsymbol{l}}_{\mathrm{dk}} \times \boldsymbol{l}_1,\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq34.png) (21)
(21)
with S1 = sin I1 + β, and ϵ⋆d defined by
![Mathematical equation: $\[\epsilon_{\star \mathrm{d}}=\frac{\phi_{\star, 1}}{\phi_{\mathrm{d}, 1}}=\frac{3}{2} \frac{m_{\star}}{2 \pi \Sigma_{a_1} a_1^2} J_2 \frac{R_{\star}^2}{a_1^2}.\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq35.png) (22)
(22)
This dimensionless parameter characterizes the relative strength between the stellar oblateness and the disk’s gravity. In realistic planetary systems, planets formed within the disk plane are initially dominated by the disk gravity, corresponding to ϵ⋆d ≪ 1. As the disk dissipates, ϵ⋆d increases and eventually exceeds unity (ϵ⋆d ≫ 1) once the disk has sufficiently dissipated.
It is easy to identify two types of equilibria from ![Mathematical equation: $\[\dot{\boldsymbol{l}}_{1}=0\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq36.png) (Tremaine et al. 2009; Fu & Wang 2024): one lies in the principal plane defined by
(Tremaine et al. 2009; Fu & Wang 2024): one lies in the principal plane defined by ![Mathematical equation: $\[\hat{\boldsymbol{s}}_{\star}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq37.png) and
and ![Mathematical equation: $\[\hat{\boldsymbol{l}}_{\mathrm{d}}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq38.png) , referred as the coplanar equilibrium; the other perpendicular to this principal plane, referred as the orthogonal equilibrium. In the coplanar equilibrium, all the three vectors (
, referred as the coplanar equilibrium; the other perpendicular to this principal plane, referred as the orthogonal equilibrium. In the coplanar equilibrium, all the three vectors (![Mathematical equation: $\[\hat{\boldsymbol{s}}_{\star}, \hat{\boldsymbol{l}}_{\mathrm{d}}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq39.png) , and
, and ![Mathematical equation: $\[\hat{\boldsymbol{l}}_{1}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq40.png) ) lie in the same plane. The orientation of
) lie in the same plane. The orientation of ![Mathematical equation: $\[\hat{\boldsymbol{l}}_{1}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq41.png) can be specified by the azimuthal angle ψ1⋆ relative to orientation of the stellar spin axis
can be specified by the azimuthal angle ψ1⋆ relative to orientation of the stellar spin axis ![Mathematical equation: $\[\hat{\boldsymbol{s}}_{\star}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq42.png) . The azimuthal angle of
. The azimuthal angle of ![Mathematical equation: $\[\hat{\boldsymbol{l}}_{1}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq43.png) relative to
relative to ![Mathematical equation: $\[\hat{\boldsymbol{l}}_{\mathrm{d}}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq44.png) is then ψ⋆0 − ψ1⋆, where ψ⋆0 is defined as the angle between
is then ψ⋆0 − ψ1⋆, where ψ⋆0 is defined as the angle between ![Mathematical equation: $\[\hat{s}_{\star}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq45.png) and
and ![Mathematical equation: $\[\hat{\boldsymbol{l}}_{\mathrm{d}}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq46.png) . The angle ψ⋆0 changes from (0, π) and the angle ψ1⋆ ranges from −π to π. Equation (21) is then reformulated as:
. The angle ψ⋆0 changes from (0, π) and the angle ψ1⋆ ranges from −π to π. Equation (21) is then reformulated as:
![Mathematical equation: $\[\begin{aligned}f\left(\psi_{1 \star}; \psi_{\star 0}, \epsilon_{\star \mathrm{d}}\right) \triangleq & ~\sin~ 2 \psi_{1 \star}-\frac{1}{\epsilon_{\star \mathrm{d}}} \frac{1}{S_1}\left(1-\frac{\pi}{4} S_1\right) \\& \times \sin~ 2\left(\psi_{\star 0}-\psi_{1 \star}\right)=0,\end{aligned}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq47.png) (23)
(23)
where S1 = |sin (ψ⋆0 − ψ1⋆)| + β.
The invariance of Eq. (23) under the transition ![Mathematical equation: $\[\hat{\boldsymbol{s}}_{\star} \rightarrow-\hat{\boldsymbol{s}}_{\star}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq48.png) suggests that we only need to focus on solutions for ψ⋆0 ∈ (0, π/2). Furthermore, due to the symmetry of the phase space under the transformation l1 → −l1, the range of ψ1⋆ can be restricted from [−π, π) to [0, π).
suggests that we only need to focus on solutions for ψ⋆0 ∈ (0, π/2). Furthermore, due to the symmetry of the phase space under the transformation l1 → −l1, the range of ψ1⋆ can be restricted from [−π, π) to [0, π).
For a purpose of comparison, we also used the linear gravitational model of the disk (Eq. (12)) to compute the equilibria. Under this model, the coplanar equilibrium equation becomes
![Mathematical equation: $\[\sin~ 2 \psi_{1 \star}-\frac{2}{\epsilon_{\star \mathrm{d}}^{\prime}} ~\sin~ \left(\psi_{\star 0}-\psi_{1 \star}\right)=0,\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq50.png) (24)
(24)
where
![Mathematical equation: $\[\epsilon_{\star \mathrm{d}}^{\prime}=\frac{3 m_{\star} J_2 R_{\star}^2 h}{2 \pi \Sigma_{\mathrm{a}_1} a_1^4}.\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq51.png) (25)
(25)
According to the two versions of coplanar equilibrium equations (23) and (25), the equilibrium solutions are functions of the primordial obliquity ψ⋆,0 and the parameter ϵ⋆d (or ![Mathematical equation: $\[\epsilon_{\star \mathrm{d}}^{\prime}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq52.png) ). By solving these two equations, Fig. 2 presents the coplanar equilibrium solutions as a function of ϵ⋆d (or
). By solving these two equations, Fig. 2 presents the coplanar equilibrium solutions as a function of ϵ⋆d (or ![Mathematical equation: $\[\epsilon_{\star \mathrm{d}}^{\prime}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq53.png) ) at a high primordial obliquity ψ⋆0 = 70°, respectively.
) at a high primordial obliquity ψ⋆0 = 70°, respectively.
In the upper panel of Fig. 2a, where the nonlinear model is utilized, there are two bifurcations, B1 and B2, appearing in the range of (0, ψ⋆0) when ϵ⋆d ~ 1. At B1, two new equilibria (P4 and P5) emerge, while at B2, equilibria P3 and P4 merge and annihilate. Conversely, the linear model (the upper panel of Fig. 2b) exhibits no bifurcations over the identical obliquity range.
We next investigated how bifurcations shape planetary orbital evolution. In the lower panels of Figs. 2a and 2b, red curves trace numerical integrations of an orbit that initially lying within the disk plane under the nonlinear and linear models, respectively, while dashed curves indicate corresponding equilibrium evolution. Under the nonlinear model, the orbit adiabatically follows the evolution of equilibrium P3 until encountering bifurcation B2, where an abrupt transition generates large-amplitude librations relative to the new equilibrium P5. Conversely, the linear model exhibits sustained adiabatic tracking without transitions. This dichotomy yields fundamentally divergent evolutionary pathways: The linear approximation (Eq. (12)) neglects essential nonlinear terms for inclined orbits, precluding reproduction of bifurcation-induced large-amplitude librations.
Exclusively employing the nonlinear model, Fig. 3 presents phase portraits illustrating topology of the phase space at various values of ϵ⋆d with a high ψ⋆0. The trajectories are plotted on a unite sphere defined by |l1| = 1, which illustrates clear geometric relationships. Due to the symmetry between ![Mathematical equation: $\[\hat{\boldsymbol{l}}_{1}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq54.png) and
and ![Mathematical equation: $\[-\hat{\boldsymbol{l}}_{1}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq55.png) , trajectories on the nonvisible hemisphere are inferable. For ϵ⋆d = 0.1, the system exhibits three equilibria: two coplanar (P2 and P3) and one orthogonal (P1). Stable libration regions around P1 and P3 are delineated by paths through the saddle point P2. At ϵ⋆d = 1.0, new equilibria P4 and P5 emerge within the principal plane, with P4 acting as a saddle point that divides stable regions around P3 (nearly aligned with
, trajectories on the nonvisible hemisphere are inferable. For ϵ⋆d = 0.1, the system exhibits three equilibria: two coplanar (P2 and P3) and one orthogonal (P1). Stable libration regions around P1 and P3 are delineated by paths through the saddle point P2. At ϵ⋆d = 1.0, new equilibria P4 and P5 emerge within the principal plane, with P4 acting as a saddle point that divides stable regions around P3 (nearly aligned with ![Mathematical equation: $\[\hat{\boldsymbol{l}}_{\mathrm{d}}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq56.png) ) and P5 (close to
) and P5 (close to ![Mathematical equation: $\[\hat{\boldsymbol{s}}_{\star}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq57.png) ). At ϵ⋆d = 10, the equilibrium P3 disappears attributed to its merging with the saddle point P4 prior to this ϵ⋆d.
). At ϵ⋆d = 10, the equilibrium P3 disappears attributed to its merging with the saddle point P4 prior to this ϵ⋆d.
From a phase-space perspective, a planetary orbit that initially lying within the disk, i.e., aligning with the stable equilibrium P3, will adiabatically track this equilibrium during slow disk dispersal (adiabatic increase in ϵ⋆d), conserving phase-space area until bifurcation B2 is encountered. At B2, the orbit experiences separatrix crossing, transitioning from alignment with P3 to large-amplitude librations about the new equilibrium P5, as also demonstrated by Fig. 2. This effect is referred to as the dynamical bifurcation-induced effect (Fu et al. 2025).
From the upper panel of Fig. 2a, the bifurcations satisfy dψ1⋆/dϵ⋆d = ∞. Substituting this condition to the equilibrium equation (Eq. (23)), the bifurcation condition can be obtained. Alternatively, from Fig. 4, the bifurcation equation is given by
![Mathematical equation: $\[\left\{\begin{array}{l}f\left(\psi_{1 \star}; \psi_{\star 0}, \epsilon_{\star \mathrm{d}}\right)=0, \\\mathrm{~d} f\left(\psi_{1 \star}; \psi_{\star 0}, \epsilon_{\star \mathrm{d}}\right) / \mathrm{d} \psi_{1 \star}=0.\end{array}\right.\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq58.png) (26)
(26)
The solutions depend on the two parameters ψ⋆0 and ϵ⋆d. However, in realistic systems, ϵ⋆d evolves from ≪ 1 to ≫ 1 during disk dispersal. Consequently, the occurrence of bifurcations depends solely on the primordial obliquity ψ⋆0. Solving Equations (26) yields a critical primordial obliquity ψ⋆0,crit ≈ 44.6° for β = 0.01 (Fu et al. 2025). Specifically, systems with ψ⋆0 > 44.6° undergo B1 and B2 bifurcations during disk dispersal, while systems below this critical value remain unaffected by such bifurcations. Figure 5 further reveals that ψ⋆0,crit depends weakly on the softening parameter β: it increases to 47.0° at β = 0.02 and 51.1° at β = 0.05.
Through the above analysis, we arrived at the following conclusions: Under adiabatic evolution of ϵ⋆d, a planet’s evolutionary pathway is primarily governed by its primordial obliquity ψ⋆0. For ψ⋆0 < ψ⋆0, crit, a planet initially aligned with the disk adiabatically tracks equilibrium P3. This enables a smooth transition from a disk-aligned state to near-alignment with the stellar spin axis. Conversely, if ψ⋆0 > ψ⋆0, crit, the planet follows P3 until encountering bifurcation B2, where a separatrix crossing in phase space triggers large-amplitude libration about equilibrium P5.
These conclusions hinge on two conditions: first, The disk dissipation timescale τd must substantially exceed the orbital precession timescale (τd ≫ τprec), ensuring adiabaticity and permitting gradual orbital evolution. Second, the tracked equilibrium must remain dynamically stable against perturbations in both l1 and e1. While the first condition is readily verified via timescale comparison, the second necessitates detailed stability analysis, which is the focus of the following subsection.
 |
Fig. 2 Coplanar equilibrium solutions and examples of orbital evolution using the full-space (nonlinear) disk gravity model (a) and the approximate linear model (b). The upper panels of (a) and (b) show equilibrium solutions as a function of ϵ⋆d (or |
![Mathematical equation: $\[\epsilon_{\star \mathrm{d}}^{\prime}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq49.png)
3.2 Stability of equilibria
Near the equilibrium (![Mathematical equation: $\[\overline{\boldsymbol{l}}_{1}, \overline{\boldsymbol{e}}_{1}=\mathbf{0}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq59.png) ), the angular momentum l1 can be written as
), the angular momentum l1 can be written as ![Mathematical equation: $\[\boldsymbol{l}_{1}=\overline{\boldsymbol{l}}_{1}+\Delta \boldsymbol{l}_{1}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq60.png) , where Δl1 denotes a small disturbance from the equilibrium. The secular equations to the first order in Δl1 and e1 (e1 = 0 + Δe1) are written as
, where Δl1 denotes a small disturbance from the equilibrium. The secular equations to the first order in Δl1 and e1 (e1 = 0 + Δe1) are written as
![Mathematical equation: $\[\begin{aligned}\Delta \dot{\boldsymbol{l}}_1= & -\left(\bar{\boldsymbol{l}}_1 \cdot \hat{\boldsymbol{s}}_{\star}\right) \hat{\boldsymbol{s}}_{\star} \times \Delta\boldsymbol{l}_1-\left(\Delta\boldsymbol{l}_1 \cdot \hat{\boldsymbol{s}}_{\star}\right) \hat{\boldsymbol{s}}_{\star} \times \bar{\boldsymbol{l}}_1 \\& -\frac{1}{\epsilon_{\star \mathrm{d}}} \frac{1}{S_1^3}\left(\bar{\boldsymbol{l}}_1 \cdot \hat{\boldsymbol{l}}_{\mathrm{d}}\right)^2\left(\Delta\boldsymbol{l}_1 \cdot \hat{\boldsymbol{l}}_{\mathrm{d}}\right) \hat{\boldsymbol{l}}_{\mathrm{d}} \times \bar{\boldsymbol{l}}_1-\frac{1}{\epsilon_{\star \mathrm{d}}} \frac{1}{S_1} \\& \times\left(1-\frac{\pi}{4} S_1\right)\left[\left(\bar{\boldsymbol{l}}_1 \cdot \hat{\boldsymbol{l}}_{\mathrm{d}}\right) \hat{\boldsymbol{l}}_{\mathrm{d}} \times \Delta\boldsymbol{l}_1+\left(\Delta\boldsymbol{l}_1 \cdot \hat{\boldsymbol{l}}_{\mathrm{d}}\right) \hat{\boldsymbol{l}}_{\mathrm{d}} \times \bar{\boldsymbol{l}}_1\right], \\\dot{\boldsymbol{e}}_1= & -\frac{1}{2}\left[1-5\left(\bar{\boldsymbol{l}}_1 \cdot \hat{\boldsymbol{s}}_{\star}\right)^2\right] \bar{\boldsymbol{l}}_1 \times \boldsymbol{e}_1-\left(\bar{\boldsymbol{l}}_1 \cdot \hat{\boldsymbol{s}}_{\star}\right) \hat{\boldsymbol{s}}_{\star} \times \boldsymbol{e}_1 \\& +\frac{1}{\epsilon_{\star \mathrm{d}}} \frac{1}{S_1}\left\{\left[1-\frac{\pi}{16} S_1\left(8-S_1^2\right)\right] \bar{\boldsymbol{l}}_1 \times \boldsymbol{e}_1-\left(1-\frac{\pi}{4} S\right)\right. \\& \left.\times\left(\hat{\boldsymbol{l}}_{\mathrm{d}} \cdot \bar{\boldsymbol{l}}_1\right) \hat{\boldsymbol{l}}_{\mathrm{d}} \times \boldsymbol{e}_1+\left(1-\frac{3 \pi}{8} S_1\right)\left(\hat{\boldsymbol{l}}_{\mathrm{d}} \cdot \boldsymbol{e}_1\right) \hat{\boldsymbol{l}}_{\mathrm{d}} \times \bar{\boldsymbol{l}}_1\right\}.\end{aligned}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq61.png) (27)
(27)
Note that the linearized evolution of Δl1 and e1 are decoupled, as shown in Eq. (27). This decoupling allows us to focus solely on the stability of the equilibrium in l1 and defer the analysis of e1 to future work.
 |
Fig. 3 Phase portraits for ψ⋆0 = 70° and ϵ⋆d = 0.1 (a), 1.0 (b), and 10.0 (c) displayed on the unite sphere. These portraits were generated by plotting level curves of the perturbing Hamiltonian from Eq. (20) with |l1| = 1. The orientations of |
![Mathematical equation: $\[\hat{\boldsymbol{s}}_{\star}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq62.png)
![Mathematical equation: $\[\hat{\boldsymbol{l}}_{\mathrm{d}}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq63.png)
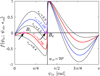 |
Fig. 4 Values of f(ψ1⋆; ψ⋆0, ϵ⋆d) defined by Eq. (23) as functions of ψ1⋆ and ϵ⋆d for ψ⋆0 = 70°. The red and blue curves represent the critical ϵ⋆d that trigger the bifurcations B1 and B2, respectively, which are characterized by f = 0 and df/dψ1⋆ = 0. The two bifurcations are further distinguished by the sign of |
![Mathematical equation: $\[\mathrm{d}^{2} f / \mathrm{d} \psi_{1 \star}^{2}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq64.png)
 |
Fig. 5 Bifurcation curves in the (ϵ⋆d, ψ⋆0) space obtained using the bifurcation conditions (Eq. (26)). Curves are shown for three disk softening scales: β = 0.01, 0.02, and 0.05. For β = 0.01, the bifurcation curves of B1 and B2 are in red and blue, respectively. Critical values of ψ⋆0 are also marked. |
3.2.1 Stability of the orthogonal equilibrium
For the orthogonal equilibrium, where ![Mathematical equation: $\[\hat{\boldsymbol{s}}_{\star} \cdot \overline{\boldsymbol{l}}_{1}=\hat{\boldsymbol{l}}_{\mathrm{d}} \cdot \overline{\boldsymbol{l}}_{1}=0\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq65.png) and S1 ≈ 1, the first part of Eq. (27) becomes
and S1 ≈ 1, the first part of Eq. (27) becomes
![Mathematical equation: $\[\Delta \dot{\boldsymbol{l}}_1=-\left(\Delta \boldsymbol{l}_1 \cdot \hat{\boldsymbol{s}}_{\star}\right) \hat{\boldsymbol{s}}_{\star} \times \bar{\boldsymbol{l}}_1-\frac{1}{\epsilon_{\star \mathrm{d}}}\left(1-\frac{\pi}{4}\right)\left(\Delta \boldsymbol{l}_1 \cdot \hat{\boldsymbol{l}}_{\mathrm{d}}\right) \hat{\boldsymbol{l}}_{\mathrm{d}} \times \bar{\boldsymbol{l}}_1.\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq66.png) (28)
(28)
The constant ![Mathematical equation: $\[l_{1}^{2}+e_{1}^{2}=1\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq67.png) results in
results in ![Mathematical equation: $\[\overline{\boldsymbol{l}}_{1} \cdot \Delta \boldsymbol{l}_{1}=0\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq68.png) at the linear level. Consequently, the linearized dynamics are confined to a two-dimensional subspace.
at the linear level. Consequently, the linearized dynamics are confined to a two-dimensional subspace.
By projecting Δl1 onto ![Mathematical equation: $\[\hat{\boldsymbol{s}}_{\star}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq69.png) and
and ![Mathematical equation: $\[\hat{\boldsymbol{l}}_{\mathrm{d}}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq70.png) , and defining
, and defining ![Mathematical equation: $\[x_{1}=\Delta \boldsymbol{l}_{1} \cdot \hat{\boldsymbol{s}}_{\star}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq71.png) and
and ![Mathematical equation: $\[x_{2}=\Delta \boldsymbol{l}_{1} \cdot \hat{\boldsymbol{l}}_{\mathrm{d}}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq72.png) , we formulate the system in terms of the state vector x = [x1 x2]T. The dynamics of x is governed by
, we formulate the system in terms of the state vector x = [x1 x2]T. The dynamics of x is governed by ![Mathematical equation: $\[\dot{\boldsymbol{x}}=A \boldsymbol{x}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq73.png) , where A is given by
, where A is given by
![Mathematical equation: $\[A=\left[\begin{array}{cc}0 & -\frac{1}{\epsilon_{\star \mathrm{d}}}\left(1-\frac{\pi}{4}\right) \hat{\boldsymbol{s}}_{\star}\left(\hat{\boldsymbol{l}}_{\mathrm{d}} \times \bar{\boldsymbol{l}}_1\right) \\-\hat{\boldsymbol{l}}_{\mathrm{d}}\left(\hat{\boldsymbol{s}}_{\star} \times \bar{\boldsymbol{l}}_1\right) & 0\end{array}\right].\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq74.png) (29)
(29)
The eigenvalues are
![Mathematical equation: $\[\lambda^2=-\frac{1}{\epsilon_{\star \mathrm{d}}}\left(1-\frac{\pi}{4}\right)\left[\left(\hat{\boldsymbol{s}}_{\star} \times \hat{\boldsymbol{l}}_{\mathrm{d}}\right) \bar{\boldsymbol{l}}_1\right]^2.\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq75.png) (30)
(30)
It is obvious that λ2 < 0, and therefore the orthogonal equilibrium P1 is linearly stable to variations in l1.
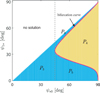 |
Fig. 6 Stability of the circular coplanar equilibria as functions of ψ⋆0 and ψ1⋆ for ψ1⋆ ∈ (0, π/2), calculated using the stability condition, Eq. (32). Blue points represent stable equilibria where λ2 < 0, and yellow points indicate unstable equilibria where λ2 > 0. The red curve presents the bifurcation curve in the (ψ⋆0, ψ1⋆) space, derived from the bifurcation conditions (Eq. (26)). |
3.2.2 Stability of the coplanar equilibria
At the coplanar circular equilibrium, we performed the projections ![Mathematical equation: $\[x_{1}=\left(\hat{\boldsymbol{l}}_{\mathrm{d}} \times \hat{\boldsymbol{s}}_{\star}\right) \cdot \Delta \boldsymbol{l}_{1}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq76.png) and
and ![Mathematical equation: $\[x_{2}=\left[\left(\hat{\boldsymbol{l}}_{\mathrm{d}} \times \hat{\boldsymbol{s}}_{\star}\right) \times \overline{\boldsymbol{l}}_{1}\right] \cdot \Delta \boldsymbol{l}_{1}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq77.png) to the first part of (27). The eigenvalues are given by
to the first part of (27). The eigenvalues are given by
![Mathematical equation: $\[\begin{aligned}\lambda^2= & {\left[\cos ^2~ \psi_{1 \star}+\frac{1}{\epsilon_{\star \mathrm{d}}} \frac{1}{S_1}\left(1-\frac{\pi}{4} S_1\right) \cos ^2~\left(\psi_{\star 0}-\psi_{1 \star}\right)\right] } \\& \times\left[-\cos~ 2 \psi_{1 \star}-\frac{1}{\epsilon_{\star \mathrm{d}}} \frac{1}{S_1}\left(1-\frac{\pi}{4} S_1\right) \cos~ 2\left(\psi_{\star 0}-\psi_{1 \star}\right)\right. \\& \left.+\frac{1}{4} \frac{1}{\epsilon_{\star \mathrm{d}}} \frac{1}{\left(S_1-h\right) S_1^2} ~\sin ^2 2\left(\psi_{\star 0}-\psi_{1 \star}\right)\right].\end{aligned}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq78.png) (31)
(31)
Utilizing the equilibrium conditions, Eq. (23), we reformed the eigenvalues as functions of ψ⋆0 and ψ1⋆, given by
![Mathematical equation: $\[\begin{aligned}\lambda^2= & {\left[\cos ^2~ \psi_{1 \star}+\frac{1}{2} ~\sin~ 2 \psi_{1 \star} ~\cot~ \left(\psi_{\star 0}-\psi_{1 \star}\right)\right] } \\& \times\left[-\sin~ 2 \psi_{\star 0} / \sin~ 2\left(\psi_{\star 0}-\psi_{1 \star}\right)\right. \\& \left.+\frac{1}{S_1\left(S_1-\beta\right)\left(4-\pi S_1\right)} \sin~ 2 \psi_{1 \star} \sin~ 2\left(\psi_{\star 0}-\psi_{1 \star}\right)\right].\end{aligned}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq79.png) (32)
(32)
If ψ1⋆ is in the range (π/2, π/2 + ψ⋆0), we find that λ2 > 0, implying the equilibrium P2 is unstable, being a saddle point. The stability of the equilibria for ψ1⋆ in the range (0, ψ⋆0) is illustrated in Fig. 6 by utilizing Eq. (32). It is shown that P3 and P5 are stable, and P4 is unstable, also being a saddle point. These findings are consistent with the phase portraits presented in Fig. 3.
4 Application to hierarchical systems
In the preceding sections, we have considered a simple system involving only one planet. In this section, we extend our analysis to hierarchical systems, characterized by the presence of a distant outer massive perturbing companion.
4.1 Equilibria and bifurcations
In the hierarchical three-body system with L1 ≪ L2, the outer planet is primarily coupled to the disk, leading to ![Mathematical equation: $\[\hat{\boldsymbol{l}}_{2} \approx \hat{\boldsymbol{l}}_{\mathrm{d}}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq80.png) . This approximation allows us to only focus on the evolution of the inner orbit. The perturbing Hamiltonian (assuming e1 = 0) under this consideration is expressed as:
. This approximation allows us to only focus on the evolution of the inner orbit. The perturbing Hamiltonian (assuming e1 = 0) under this consideration is expressed as:
![Mathematical equation: $\[\Phi_{\mathrm{circ}}=-\frac{\phi_{\star}}{2}\left(\boldsymbol{l}_1 \cdot \hat{\boldsymbol{s}}_{\star}\right)^2+\phi_{\mathrm{d}} S_1\left(1-\frac{\pi}{8} S_1\right)-\frac{\phi_{12}}{2}\left(\boldsymbol{l}_1 \cdot \hat{\boldsymbol{l}}_2\right)^2.\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq81.png) (33)
(33)
Then, the circular equilibria can be obtained from the equation
![Mathematical equation: $\[\left(\boldsymbol{l}_1 \cdot \hat{\boldsymbol{s}}_{\star}\right) \hat{\boldsymbol{s}}_{\star} \times \boldsymbol{l}_1+\left[\frac{1}{\epsilon_{\star \mathrm{d}}} \frac{1}{S_1}\left(1-\frac{\pi}{4} S_1\right)+\frac{1}{\epsilon_{\star \mathrm{p}}}\right]\left(\hat{\boldsymbol{l}}_{\mathrm{d}} \cdot \hat{\boldsymbol{l}}_1\right) \hat{\boldsymbol{l}}_{\mathrm{d}} \times \boldsymbol{l}_1=0.\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq82.png) (34)
(34)
Here ϵ⋆d is defined by Eq. (22), and ϵ⋆p is defined as the relative magnitude between the stellar oblateness and the perturbation from the outer companion:
![Mathematical equation: $\[\epsilon_{\star \mathrm{p}}=\frac{\phi_{1 \star}}{\phi_{12}}=2 \frac{m_{\star}}{m_2} \frac{J_2 R_{\star}^2}{a_1^2} \frac{a_2^3\left(1-e_2^2\right)^{3 / 2}}{a_1^3}.\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq83.png) (35)
(35)
From Eq. (34), it is evident that the introduction of the outer perturber does not alter the types of equilibrium solutions – coplanar or orthogonal equilibria. However, it does modify the structure of the phase space depending on the value ϵ⋆p, as illustrated in Fig. 7. For the high primordial obliquity ψ⋆0 = 70°, the phase space structure at ϵ⋆d ~ 1 differs between the case with ϵ⋆p = 10.0 (upper panels) and the case with ϵ⋆p = 1.0 (lower panels). This arises because bifurcations occur in the former case but not in the latter. As shown, when ϵ⋆p = 1.0, bifurcations are inhibited and, as a result, the topology of the phase space does not change with ϵ⋆d. We therefore investigated how the parameter ϵ⋆p influences the dynamical bifurcation-induced effect and stability of the equilibria.
Constraining to coplanar equilibria, the equilibrium equation (34) becomes
![Mathematical equation: $\[\begin{array}{r}g\left(\psi_{1 \star}; \psi_{\star 0}, \epsilon_{\star \mathrm{d}}, \epsilon_{\star \mathrm{p}}\right)=\sin~ 2 \psi_{1 \star}-\left[\frac{1}{\epsilon_{\star \mathrm{d}}} \frac{1}{S_1}\left(1-\frac{\pi}{4} S_1\right)\right. \\\left.+\frac{1}{\epsilon_{\star \mathrm{p}}}\right] ~\sin~ 2\left(\psi_{\star 0}-\psi_{1 \star}\right)=0\end{array}.\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq84.png) (36)
(36)
The bifurcation condition is then
![Mathematical equation: $\[\left\{\begin{array}{l}g\left(\psi_{1 \star}; \psi_{\star 0}, \epsilon_{\star \mathrm{d}}, \epsilon_{\star \mathrm{p}}\right)=0, \\\mathrm{~d} g\left(\psi_{1 \star}; \psi_{\star 0}, \epsilon_{\star \mathrm{d}}, \epsilon_{\star \mathrm{p}}\right) / \mathrm{d} \psi_{1 \star}=0.\end{array}\right.\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq85.png) (37)
(37)
Note this condition depends on three parameters: ψ⋆0, ϵ⋆d, and ϵ⋆p.
By using this condition, the bifurcation curves in the (ϵ⋆d, ϵ⋆p) and (ψ⋆0, ϵ⋆p) spaces are depicted in Fig. 8. In the absence of an outer perturbation, i.e., ϵ⋆p = ∞, the bifurcations depend solely on the primordial misalignment angle ψ⋆0, since ϵ⋆d typically sweeps from an extremely small value to a much larger value as the disk disperses, as discussed above. When an outer perturbation is considered, both ψ⋆0 and ϵ⋆p play critical roles in determining the occurrence of bifurcations. Bifurcations only occur if ϵ⋆p surpasses a specific threshold that depends on ψ⋆0, as shown in Fig. 8a. Moreover, as ψ⋆0 decreases, the bifurcation region associated with ϵ⋆d narrows and eventually disappears.
Figure 8b shows the critical misalignment angle, ![Mathematical equation: $\[\psi_{\star 0, \text {crit}}^{P}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq88.png) , as a function of ϵ⋆p. As
, as a function of ϵ⋆p. As ![Mathematical equation: $\[\epsilon_{\star \mathrm{p}} \rightarrow \infty, \psi_{\star 0, \text { crit }}^{P} \rightarrow \psi_{\star 0, \text { crit }} \approx 44.6^{\circ}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq89.png) for β = 0.01. Conversely,
for β = 0.01. Conversely, ![Mathematical equation: $\[\psi_{\star 0, \text {crit}}^{P}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq90.png) increases inversely with ϵ⋆p. For example, when ϵ⋆p is about 5.0 and 2.0, ψ⋆0,crit becomes 50° and 60°, respectively. Finally, when
increases inversely with ϵ⋆p. For example, when ϵ⋆p is about 5.0 and 2.0, ψ⋆0,crit becomes 50° and 60°, respectively. Finally, when ![Mathematical equation: $\[\epsilon_{\star \mathrm{p}} \rightarrow 1.0, \psi_{\star 0, \text { crit }}^{P} \rightarrow 90^{\circ}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq91.png) . This condition can be confirmed by substituting ψ⋆0 = 90° into Eqs. (37), resulting in
. This condition can be confirmed by substituting ψ⋆0 = 90° into Eqs. (37), resulting in
![Mathematical equation: $\[\left(1-\frac{1}{\epsilon_{\star \mathrm{p}}}\right) \frac{4}{\left(4-\pi S_1\right) S_1} ~\sin~ \psi_{1 \star} ~\sin~ 2 \psi_{1 \star}=0.\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq92.png) (38)
(38)
Since ψ1⋆ < ψ⋆0 = 90°, the above equation gives ϵ⋆p = 1. As a result, if ϵ⋆p < 1, the bifurcations are completely inhibited for any value of ψ⋆0.
Observations indicate that about 40% of close-in small planets have outer giant planet companions (Rosenthal et al. 2022). In Table 1, we present the parameters ϵ⋆p and the corresponding values of ![Mathematical equation: $\[\psi_{\star 0, \text {crit}}^{P}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq93.png) for several hierarchical systems that include an outer giant planet, assuming typical pre-main-sequence stellar parameters (Bouvier et al. 2014). The stellar oblateness J2 can be estimated by
for several hierarchical systems that include an outer giant planet, assuming typical pre-main-sequence stellar parameters (Bouvier et al. 2014). The stellar oblateness J2 can be estimated by
![Mathematical equation: $\[J_2=\frac{2 k_{\mathrm{q} \star} \Omega_{\star}^2}{3 G m_{\star} / R_{\star}^3},\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq94.png) (39)
(39)
where kq⋆ is the stellar apsidal motion constant (kq⋆ ≃ 0.1 for fully convective stars), and Ω⋆ is the stellar rotational angular velocity.
From Cases I–IV, it is evident that a giant planet located in the outer region (1–10 au) generally results in ϵ⋆p > 1 for the inner, close-in planet. That is, the outer companions typically modify the critical ψ⋆0 for bifurcations, but are generally unable to completely prevent them.
The evolution of inclinations between the inner and outer orbits for Cases I and III is depicted in Fig. 9a. In Case I, ψ⋆0 is set as 65°, larger than the critical obliquity estimated to be ![Mathematical equation: $\[\psi_{\star 0, \text {crit}}^{P}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq95.png) = 45.3°. This results in large-amplitude mutual inclinations as a result of encountering the bifurcation B2, which is reflected by the jump in the evolutionary path of the equilibrium in the figure. In Case III,
= 45.3°. This results in large-amplitude mutual inclinations as a result of encountering the bifurcation B2, which is reflected by the jump in the evolutionary path of the equilibrium in the figure. In Case III, ![Mathematical equation: $\[\psi_{\star 0 \text {,crit}}^{P}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq96.png) is approximately 71.8°. Here, the scenarios of ψ⋆0 = 65° and 78° are expected to fall within the adiabatic and separatrix-crossing regimes, respectively, leading to distinct evolutionary behaviors as shown in the figure. Note in the adiabatic regime, if ψ⋆0 is close to
is approximately 71.8°. Here, the scenarios of ψ⋆0 = 65° and 78° are expected to fall within the adiabatic and separatrix-crossing regimes, respectively, leading to distinct evolutionary behaviors as shown in the figure. Note in the adiabatic regime, if ψ⋆0 is close to ![Mathematical equation: $\[\psi_{\star 0, \text {crit}}^{P}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq97.png) – as is the case of ψ⋆0 = 65° – small nonadiabatic components can still develop, due to the comparable timescales of the equilibrium transition (which becomes small at certain epoch of ϵ⋆d ~ 1 if
– as is the case of ψ⋆0 = 65° – small nonadiabatic components can still develop, due to the comparable timescales of the equilibrium transition (which becomes small at certain epoch of ϵ⋆d ~ 1 if ![Mathematical equation: $\[\psi_{\star 0} \rightarrow \psi_{\star 0, \text {crit}}^{P}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq98.png) ) and the orbit precession.
) and the orbit precession.
The estimations of ϵ⋆p and ![Mathematical equation: $\[\psi_{\star 0, \text {crit}}^{P}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq99.png) have also been conducted for the K2-290A and HD 3167 systems, both of which are characterized by multiple coplanar planets with high stellar obliquities. Recent studies suggest that primordial disk misalignments could be the causes of the two unusual system architectures (Hjorth et al. 2021; Fu & Wang 2024). Given that our study focuses on the dynamical evolution subsequent to the formation of primordial misalignments, our analysis can provide additional examinations on these proposed dynamical processes.
have also been conducted for the K2-290A and HD 3167 systems, both of which are characterized by multiple coplanar planets with high stellar obliquities. Recent studies suggest that primordial disk misalignments could be the causes of the two unusual system architectures (Hjorth et al. 2021; Fu & Wang 2024). Given that our study focuses on the dynamical evolution subsequent to the formation of primordial misalignments, our analysis can provide additional examinations on these proposed dynamical processes.
The K2-290A system, comprising two coplanar planets in a retrograde configuration, exhibits a stellar obliquity of ψ⋆ = 124° ± 6°. Two scenarios for the host star’s parameters, referred to as K2-290A(1) and K2-290A(2), are considered and detailed in Table 1. In K2-290A(1), a strong stellar oblateness is assumed with R⋆ = 2.5 R⊙ and P⋆ = 3 days, resulting in ![Mathematical equation: $\[\psi_{\star 0, \text {crit}}^{P}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq100.png) ≈ 56.8°. Therefore, bifurcations are avoided if ψ⋆0 < 56.8° or > 123.2°. The inclination evolution for ψ⋆0 = 110° and 124° are illustrated in Fig. 9b. In the case of ψ⋆0 = 124°, considering the decay of stellar oblateness, a coplanar configuration with high stellar obliquity, ψ⋆ ≈ 124°, can be achieved. Conversely, the case of ψ⋆0 = 110° fails to produce coplanar configuration.
≈ 56.8°. Therefore, bifurcations are avoided if ψ⋆0 < 56.8° or > 123.2°. The inclination evolution for ψ⋆0 = 110° and 124° are illustrated in Fig. 9b. In the case of ψ⋆0 = 124°, considering the decay of stellar oblateness, a coplanar configuration with high stellar obliquity, ψ⋆ ≈ 124°, can be achieved. Conversely, the case of ψ⋆0 = 110° fails to produce coplanar configuration.
In K2-290B(2), a weaker stellar oblateness is assumed, resulting in ϵ⋆p < 1, which prevents bifurcations for any value of ψ⋆0. This ensures coplanarity more readily. Consequently, we conclude that for a significant portion of the parameter space of R⋆ and P⋆, the evolution remains adiabatic at such high primordial obliquities (ψ⋆0 ~ 124°), supporting the hypothesis that primordial misalignment is a plausible origin for the observed configuration.
In the HD 3167 system, the inner and outer orbits are nearly perpendicular with a mutual inclination ![Mathematical equation: $\[i_{\text {mut }} \approx 102.3_{+7.4^{\circ}}^{-8.0^{\circ}}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq101.png) . Therefore, unlike the K2-290A system, which requires an adiabatic process to ensure coplanarity, the HD-3167 system demands a separatrix-crossing process to achieve such a high mutual inclination. As indicated in Table 1, even assuming a relatively weak initial stellar oblateness, we have ϵ⋆p ≫ 1. This suggests that large-amplitude mutual inclinations between the inner and outer orbits can be robustly established at high ψ⋆0 through the bifurcation-induced effect (Fu & Wang 2024).
. Therefore, unlike the K2-290A system, which requires an adiabatic process to ensure coplanarity, the HD-3167 system demands a separatrix-crossing process to achieve such a high mutual inclination. As indicated in Table 1, even assuming a relatively weak initial stellar oblateness, we have ϵ⋆p ≫ 1. This suggests that large-amplitude mutual inclinations between the inner and outer orbits can be robustly established at high ψ⋆0 through the bifurcation-induced effect (Fu & Wang 2024).
In Table 1, we also provide the parameter ϵ⋆p when the outer perturbation is solely contributed by the outer disk, under nonhomologous disk dissipation conditions. It shows that the perturbation exerted by the outer disk is relatively weak, exerting only a minor influence on the critical primordial obliquity for the bifurcations.
 |
Fig. 7 Phase portraits for ψ⋆0 = 70° presented in the (ψ1⋆ cos Δh, ψ1⋆ sin Δh) plane, where Δh represents the difference in the longitudes of the ascending node between the inner and outer orbits. These portraits were generated by plotting level curves of the perturbing Hamiltonian (Eq. (33)). In the upper panels, ϵ⋆p = 10.0 and ϵ⋆d = 0.1, 1.5, and 5.0, respectively. In the lower panels, ϵ⋆p = 1.0 with the same variations in ϵ⋆d. Equilibrium points are indicated with colored markers. The projections of |
![Mathematical equation: $\[\hat{\boldsymbol{s}}_{\star}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq86.png)
![Mathematical equation: $\[\hat{\boldsymbol{l}}_{\mathrm{d}}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq87.png)
 |
Fig. 8 Bifurcation curves for hierarchical systems. (a) Bifurcation curves for several high values of ψ⋆0 presented in the (ϵ⋆d, ϵ⋆p) space. The dashed and solid curves represent the bifurcations B1 and B2, respectively. (b) Bifurcation curves in the (ψ⋆0, ϵ⋆p) space, where the curves for B1 and B2 degenerate into one curve. The softening scale is chosen as β = 0.01. |
4.2 Stability
4.2.1 The orthogonal equilibrium
Building on the methodologies outlined in Section 3, we can easily determine that the orthogonal equilibrium P1 is linearly stable in response to variations in l1.
4.2.2 The coplanar equilibria
For the coplanar equilibria, the stability to variations in l1 can be determined by the eigenvalues given by
![Mathematical equation: $\[\begin{aligned}\lambda^2 & =\left[\cos ^2 \psi_{1 \star}+\frac{1}{2} \sin~ 2 \psi_{1 \star} ~\cot~ \left(\psi_{\star 0}-\psi_{1 \star}\right)\right] \\& \times\left[\frac{-\sin \psi_{\star 0}}{\sin~ 2\left(\psi_{\star 0}-\psi_{1 \star}\right)}+\frac{1}{S_1\left(S_1-\beta\right)\left(4-\pi S_1\right)}\right. \\& \left.\times\left(\sin~ 2 \psi_{1 \star}-\frac{1}{\epsilon_{\star \mathrm{p}}} \sin~ 2\left(\psi_{\star 0}-\psi_{1 \star}\right)\right) \sin~ 2\left(\psi_{\star 0}-\psi_{1 \star}\right)\right].\end{aligned}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq102.png) (40)
(40)
If ψ1⋆ lies within the interval (π/2, π), the expression within the first square bracket on the right-hand side of Eq. (40) is positive. Applying Eq. (36), we find that sin 2ψ1⋆ – sin 2(ψ⋆0 − ψ1⋆)/ϵ⋆p > 0, ensuring the term in the second square bracket is also positive. Consequently, the equilibrium, P2, is unstable with respect to changes in l1.
The stability of the equilibria for ψ1⋆ in the range (0, π/2) is illustrated in Fig. 10 by using Eq. (40). This stability analysis aligns with the behaviors observed in the phase portraits and indicated by the bifurcation curves. Specifically, if ϵ⋆p > 1.0, the equilibria P3 and P5 are stable, whereas P4 is unstable. When ϵ⋆p < 1.0, bifurcations are inhibited, resulting in P3 being the sole stable equilibrium.
5 Application to compact multi-planet systems
Over the past decade, a large amount of super-Earth and sub-Neptune planets—bodies with size ranging from 1 to 4R⊕—has been discovered by Kepler mission. These planets are predominantly found in multi-planet systems that typically exhibit compact orbital configurations. In this section, we extend our analysis to these compact multi-planet systems.
Parameters of several representative hierarchical systems.
5.1 Equilibria of multiple planets
The secular Hamiltonian that governs the secular evolution of np planets in a compact configuration is given by
![Mathematical equation: $\[\Phi=\sum_{i=1}^{n_{\mathrm{p}}} \Phi_{\star, i}+\Phi_{\mathrm{d}, i}+\sum_{i \neq j} \Phi_{i j},\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq107.png) (41)
(41)
where Φij is the interaction potential between planets i and j through Laplace-Lagrange theory (Eq. (8)). Then, by using Eqs. (6) and (7), the secular equations of motion can be obtained.
The equilibrium conditions should be established for np planets, each with planetary mass mi, semimajor axis ai (where i = 1, 2 . . ., np and a1 < . . . anp), and a circular orbit (ei = 0). The equilibrium for the i-th planet satisfies
![Mathematical equation: $\[\begin{aligned}& \left(\boldsymbol{l}_i \cdot \hat{\boldsymbol{s}}_{\star}\right) \hat{\boldsymbol{s}}_{\star} \times \boldsymbol{l}_i+\frac{1}{\epsilon_{\star \mathrm{d}, i}} \frac{1}{S_i}\left(1-\frac{\pi}{4} S_i\right)\left(\hat{\boldsymbol{l}}_{\mathrm{d}} \cdot \hat{\boldsymbol{l}}_i\right) \hat{\boldsymbol{l}}_{\mathrm{d}} \times \boldsymbol{l}_i \\& +\sum_{j \neq i} \frac{1}{\epsilon_{\star j, i}}\left(\hat{\boldsymbol{l}}_j \cdot \hat{\boldsymbol{l}}_i\right) \hat{\boldsymbol{l}}_j \times \boldsymbol{l}_i=0,\end{aligned}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq108.png) (42)
(42)
where ϵ⋆j,i is defined by
![Mathematical equation: $\[\epsilon_{\star j, i}=\frac{\phi_{\star i}}{\phi_{i j}}=\left\{\begin{array}{l}6 \frac{m_{\star}}{m_j}\left(\frac{a_j}{a_i}\right)^2 \frac{J_2 R_{\star}^2}{a_i^2} \frac{1}{b_{3 / 2}^{(1)}\left(a_i / a_j\right)}, \quad a_i<a_j, \\6 \frac{m_{\star}}{m_j} \frac{J_2 R_{\star}^2}{a_i a_j} \frac{1}{b_{3 / 2}^{(1)}\left(a_j / a_i\right)}, \quad a_i>a_j.\end{array}\right.\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq109.png) (43)
(43)
Focusing solely on the coplanar equilibrium solutions, Eq. (42) simplifies to
![Mathematical equation: $\[\begin{aligned}g_i \triangleq & ~\sin~ 2 \psi_{i \star}-\frac{1}{\epsilon_{\star \mathrm{d}, i}} \frac{1}{S_i}\left(1-\frac{\pi}{4} S_i\right) \sin~ 2\left(\psi_{\star 0}-\psi_{i \star}\right) \\& -\sum_{j \neq i} \frac{1}{\epsilon_{\star j, i}} \sin~ 2\left(\psi_{j \star}-\psi_{i \star}\right)=0.\end{aligned}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq110.png) (44)
(44)
Determining the equilibrium solutions for np planets involves solving np coupled nonlinear equations – a computationally challenging task. This study instead prioritizes identifying whether planetary orbits undergo bifurcation-induced evolution, a critical factor governing system evolution pathways. We therefore focused on establishing bifurcation conditions in compact multi-planet systems.
Given the complexity of a thorough exploration of the parameter space, we restricted our analysis to qualitative assessments to establish a approximate criterion for the system’s evolution pattern. Typically, the innermost orbit, which is most influenced by stellar oblateness, is the first to experience the bifurcation at high primordial obliquities. Consequently, motivated by the hierarchical systems, we utilized the parameter ϵ⋆p,1 ≜ ∑j ϵ⋆j,1 (where ϵ⋆j,1 is defined similar to Eq. (35)) and ψ⋆0 to characterize the system’s evolution.
5.2 Numerical simulations
To establish a preliminary criterion, we conducted numerical simulations on several representative compact multi-planet systems with varying order of ϵ⋆p. The system parameters are detailed in Table 2.
In Case I, where ϵ⋆p,1 ≈ 8.12, the effective ![Mathematical equation: $\[\psi_{\star 0 \text {,crit}}^{P}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq111.png) for the innermost planet is estimated to be 48.1°. As depicted in Fig. 11a, when ψ⋆0 = 45°, all planets undergo adiabatic evolution, following their equilibrium paths. Conversely, at ψ⋆0 = 60°, the system has experienced the separatrix-crossing behavior, leading to significant stellar obliquities and mutual planetary inclinations. A similar behavior is observed in Case II, as shown in Fig. 11b, where ϵ⋆p,1 ≈ 1.56 and
for the innermost planet is estimated to be 48.1°. As depicted in Fig. 11a, when ψ⋆0 = 45°, all planets undergo adiabatic evolution, following their equilibrium paths. Conversely, at ψ⋆0 = 60°, the system has experienced the separatrix-crossing behavior, leading to significant stellar obliquities and mutual planetary inclinations. A similar behavior is observed in Case II, as shown in Fig. 11b, where ϵ⋆p,1 ≈ 1.56 and ![Mathematical equation: $\[\psi_{\star 0, \text {crit}}^{P}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq112.png) is estimated to be about 64.5°. Therefore, we conclude that if ϵ⋆p,1 > 1, the critical angle
is estimated to be about 64.5°. Therefore, we conclude that if ϵ⋆p,1 > 1, the critical angle ![Mathematical equation: $\[\psi_{\star 0, \text {crit}}^{P}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq113.png) serves as a reliable indicator of the system’s evolutionary pattern, analogous to the hierarchical systems discussed in Sect. 4.
serves as a reliable indicator of the system’s evolutionary pattern, analogous to the hierarchical systems discussed in Sect. 4.
For ϵ⋆p,1 ≲ 1, the bifurcations in hierarchical systems are almost entirely inhibited. However, in compact multi-planet systems, the coupled evolution among the planetary orbits allows the separatrix-crossing behaviors to persist at sufficiently high ψ⋆0, resulting in moderate stellar oblateness and mutual inclinations, as illustrated in Fig. 11c for Cases III.
When ϵ⋆p,1 ≪ 1, interplanetary coupling dominates over perturbations from stellar oblateness, causing the planets to evolve collectively as a single plane. Consequently, the system’s evolution resembles that of a single-planet system, as discussed in 3. The resulting orbital architectures feature coplanar planets with either low stellar obliquities (![Mathematical equation: $\[\psi_{\star 0}<\psi_{\star 0, \text {crit}}^{*}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq114.png) ; Fig. 11d), upper panels) or high stellar obliquities (
; Fig. 11d), upper panels) or high stellar obliquities (![Mathematical equation: $\[\psi_{\star 0}>\psi_{\star 0, \text { crit }}^{*}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq115.png) ; Fig. 11d, lower panels). Note that
; Fig. 11d, lower panels). Note that ![Mathematical equation: $\[\psi_{\star 0, \text {crit}}^{*}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq116.png) can differ from the critical obliquity ψ⋆0,crit (≈ 44.6°) derived for single-planet systems due to the planetary interactions.
can differ from the critical obliquity ψ⋆0,crit (≈ 44.6°) derived for single-planet systems due to the planetary interactions.
We highlight that in the regime of ϵ⋆p,1 ≪ 1, planets remain coplanar despite undergoing separatrix-crossing evolution at high ψ⋆0, thereby preserving orbital stability (no eccentricity excitations). Consequently, stable, coplanar multi-planet systems exhibiting high stellar obliquities can emerge in this regime.
In the separatrix-crossing regime, large mutual inclinations between planetary orbits may compromise the accuracy of the Laplace-Lagrange approximation. Nonetheless, this framework remains useful for identifying bifurcations and distinguishing between adiabatic and separatrix-crossing evolution. On the other hand, while our simulations neglect eccentricity vector evolution, we emphasize that in this regime, planetary orbits could experience eccentricity excitations due to large-amplitude librating mutual inclinations established during disk dispersal. These excitations can trigger orbital destabilization. For comprehensive modeling of secular planet-planet interactions, the Gauss ring averaging method provides an efficient approach to simulating long-term evolution (Touma et al. 2009), though its implementation falls beyond the scope of this study.
To evaluate the prevalence of different regimes (ϵ⋆p,1 > 1, ϵ⋆p,1 ≲ 1, or ϵ⋆p,1 ≪ 1) in compact multi-planet systems, we computed ϵ⋆p,1 as a function of the innermost semimajor axis a1 using typical system parameters, as shown in Fig. 12. Our analysis considered two pre-main-sequence stellar oblateness values: a stronger case J2 = 7.97 × 10−4 and a weaker case J2 = 1.46 × 10−4, assuming regular orbital spacings. According to this figure, systems with a1 ≲ 0.1 au predominantly fall within the regime of ϵ⋆p,1 > 1; systems with 0.1 ≲ a1 ≲ 0.2–0.25 au mostly result in ϵ⋆p,1 ≲ 1; and systems with a1 ≳ 0.2–0.25 au generally lead to ϵ⋆p,1 ≪ 1.
Combining these estimates with Kepler multi-planet system statistics from the NASA Exoplanet Archive, as shown in Fig. 12, we find that > 90% compact systems have a1 < 0.15. This indicates that that during early evolution, most systems reside in either the ϵ⋆p,1 > 1 or ϵ⋆p,1 ≲ 1 regime. In contrast, systems featured by ϵ⋆p,1 ≪ 1 are rare. Consequently, while primordial misalignments may be common, coplanar multi-planet systems exhibiting high stellar obliquities (requiring ϵ⋆p,1 ≪ 1) remain uncommon-– consistent with observational evidence that Kepler multi-planet systems generally exhibit low stellar obliquities.
 |
Fig. 9 Evolution of orbital inclinations between inner and outer orbits for hierarchical three-body systems obtained by integrating the secular equations for circular orbits. The system parameters are detailed in Table 1. We set the timescale of the disk dissipation (τd) to 1 × 104 yr. In (a), the decay of host stellar oblateness is not considered. In (b), the oblateness of the host star decays due to its radius contraction: R⋆ = R⋆ (0)/(1 + t/τR⋆)−1/3, where τR⋆ = 1 Myr. The temporal evolution of the equilibrium that dominates the planet’s evolution is depicted for each system. Notably, a jump in the equilibrium trajectory signifies an encounter with bifurcation B2. |
6 Discussion and conclusion
We have studied the secular dynamics of planetary systems in the presence of misaligned protoplanetary disks. More specifically, we have presented an analytical study of the basic mechanism – the bifurcation-induced effect due to the saddle-node bifurcation occurring during the disk dispersal – that robustly leads to separatrix-crossing behavior, thus causing large-amplitude librating mutual planetary inclinations.
The separatrix-crossing behavior induced by this dynamical bifurcation is theoretically independent of the timescale of disk dispersal but depends on the primordial stellar obliquities. This is in contrast with the mechanism proposed by Spalding & Millholland (2020), who considered a similar dynamical problem involving planet-disk interactions. In their study, the transition between adiabatic and nonadiabatic regimes is explicitly dependent on the relative timescales of disk dispersal and orbital precession. The underlying principle is intuitive: if τd > τ⋆1 (where τ⋆1 represents the minimum orbital precession timescale induced by stellar oblateness), planets adiabatically track their equilibrium paths. Conversely, if τd ≲ τ⋆1, planets undergo nonadiabatic evolution because the equilibria evolve too rapidly for the planets to follow them effectively. It is evident that this process is independent of the specific values of the primordial misalignment angles.
The qualitative differences observed between these two studies stem from the distinct secular gravitational models of the protoplanetary disks employed. Spalding & Millholland (2020) adopted the linear disk model (Eq. (12)), which ignores a critical nonlinear factor and is only valid when planets remain close to the disk plane (Hahn 2003; Zanazzi & Lai 2018). In contrast, our work adopts a more comprehensive secular model that is feasible for the full physical space (Schulz 2012; Fu & Wang 2024). As a result, Spalding & Millholland (2020) failed to identify the dynamical bifurcations studied here.
Synthesizing the findings from the two studies, we conclude that both the timescale of disk dispersal and the presence of dynamical bifurcations are critical in determining the evolutionary patterns of planetary systems. Specifically, if τd ≲ τ⋆1, the evolution is expected to be nonadiabatic independent of other parameters, producing significant mutual planetary inclinations. Conversely, if τd > τ⋆1, the nature of the evolution depends on the initial conditions: when ψ⋆0 < ψ⋆0,crit, planets adiabatically follow their equilibria, maintaining coplanarity; when ψ⋆0 > ψ⋆0,crit, the bifurcation leads to separatrix-crossing behaviors, forming large-amplitude librating inclinations. Current observations suggest that the timescale for photoevaporation-driven dispersal of the inner regions of the disk ranges approximately from 102 to 105 yr. During the early epoch, the minimum orbit precession timescale (τ⋆1), driven by young stellar oblateness, is typically 102 to 103 yr for a1 < 0.1 au. Therefore, only at the lower limit of these potential τd is the nonadiabatic process induced by the mechanism proposed by Spalding & Millholland (2020). In other cases, the evolution patterns are determined by the framework proposed in this study.
In a simple system with a single planet, the critical primordial misalignment angle, ψ⋆0,crit, for triggering the bifurcation is about 44.6° for a disk softening scale of β = 0.01. This critical angle is slightly influenced by the value of β. A larger β leads to a larger ψ⋆0,crit.
Applying this to two-planet systems with hierarchical configurations, the introduction of an outer perturbation modifies this fundamental mechanism. We introduced a new parameter, ϵ⋆p, to quantify the relative magnitude of stellar oblateness versus the external perturbation, thus characterizing the modified parameter space. Our analysis reveals that when ϵ⋆p > 1, the critical ψ⋆0 for the bifurcation increases from ψ⋆0,crit to a higher value, denoted as ![Mathematical equation: $\[\psi_{\star 0, \text {crit}}^{\mathrm{p}}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq119.png) . This value increases as ϵ⋆p decreases. As
. This value increases as ϵ⋆p decreases. As ![Mathematical equation: $\[\epsilon_{\star \mathrm{p}} \rightarrow 1, \psi_{\star 0, \text { crit }}^{\mathrm{p}} \rightarrow 90^{\circ}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq120.png) . If ϵ⋆p < 1, the bifurcation is entirely inhibited for any value of ψ⋆0.
. If ϵ⋆p < 1, the bifurcation is entirely inhibited for any value of ψ⋆0.
This mechanism also operates in compact multi-planet systems. We propose a rough criterion to characterize the system evolution: if ϵ⋆p,1 > 1, there exists a critical angle, ![Mathematical equation: $\[\psi_{\star 0, \text {crit}}^{P}\]$](/articles/aa/full_html/2026/01/aa55897-25/aa55897-25-eq121.png) , for the bifurcation; if ϵ⋆p,1 ≲ 1, bifurcation occurs only at sufficiently high values of ψ⋆0; if ϵ⋆p,1 ≪ 1, the dynamical behavior reverts to one more typical of a single-planet system.
, for the bifurcation; if ϵ⋆p,1 ≲ 1, bifurcation occurs only at sufficiently high values of ψ⋆0; if ϵ⋆p,1 ≪ 1, the dynamical behavior reverts to one more typical of a single-planet system.
Through a preliminary statistical analysis of the Kepler sample of multi-planet systems, we find that most systems exhibit ϵ⋆p,1 > 1 or ≲ 1. Consequently, compact multi-planet systems are likely to display either well-aligned and coplanar configurations or low to moderate stellar obliquities and mutual planetary inclinations. In contrast, coplanar multi-planet systems with high stellar obliquities, which would require ϵ⋆p,1 ≪ 1, appear to be rare, aligning with current observations.
 |
Fig. 10 Stability of the coplanar equilibria in the (ψ⋆0, ψ1⋆) space for ϵ⋆p = 5.0, 2.0, and 0.99, respectively. The stable solutions, indicated by λ2 < 0, are marked with blue points, while the unstable solutions, where λ2 > 0, are marked with yellow points. The bifurcation curve corresponding to each value of ϵ⋆p is also depicted. |
Parameters of several representative compact multi-planet systems.
 |
Fig. 11 Dynamical evolution of multi-planet systems from Table 2. Each column displays the evolution of stellar obliquities and mutual planetary inclinations for a system under two distinct initial stellar obliquity angles (ψ⋆0). The magenta curves in each obliquity panel represent the evolution paths of equilibria. Note that in all simulations, we ignore the evolution of the eccentricity vectors by assuming all the orbits are initially circular. In addition to the parameters given in Table 2, other integration parameters are: m⋆ = 1M⊙, τd = 1 × 104 yr, rin = 0.03 au, and rout = 50 au. The disk mass (md) is set to 0.05M⊙ for Cases I-III and to 0.02M⊙ for Case V, respectively. |
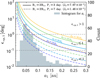 |
Fig. 12 Estimations of ϵ⋆p,1 as a function of a1 for typical compact multi-planet systems. This figure displays estimations of ϵ⋆p,1 for three-planet systems with uniform planetary masses of m1-m3 = 5m⊕ and varying orbital separations δa = {16, 20, 25, 30} RH. Two sets of stellar parameters, resulting in J2 = 7.97 × 10−4 and J2 = 1.46 × 10−4, respectively, are adopted. The selection of δa= 16RH represents the minimum spacing required for these systems to maintain stability over 1 Gyr (Zhu & Dong 2021). The grade-shaded histogram (presented using the right y-axis) illustrates the distribution of a1 for the Kepler sample of multi-planet systems, which are retrieved from the NASA Exoplanet Archive. |
Acknowledgements
This work was supported by the Fundamental Research Funds for the Central Universities.
References
- Alexander, R., Pascucci, I., Andrews, S., Armitage, P., & Cieza, L. 2014, in Protostars and planets VI, eds. B. Henrik, K. Ralf S., P. D. Cornelis, & H. Thomas, 475 [Google Scholar]
- Alexander, R. D., Clarke, C., & Pringle, J. 2006, MNRAS, 369, 229 [NASA ADS] [CrossRef] [Google Scholar]
- Barber, M. G., Mann, A. W., Vanderburg, A., et al. 2024, Nature, 635, 574 [NASA ADS] [CrossRef] [Google Scholar]
- Bate, M., Lodato, G., & Pringle, J. 2010, MNRAS, 401, 1505 [NASA ADS] [CrossRef] [Google Scholar]
- Batygin, K. 2012, Nature, 491, 418 [NASA ADS] [CrossRef] [Google Scholar]
- Batygin, K., & Adams, F. C. 2013, ApJ, 778, 169 [NASA ADS] [CrossRef] [Google Scholar]
- Beaugé, C., & Nesvornỳ, D. 2012, ApJ, 751, 119 [CrossRef] [Google Scholar]
- Bourrier, V., Deline, A., Krenn, A., et al. 2022, A&A, 668, A31 [NASA ADS] [CrossRef] [EDP Sciences] [Google Scholar]
- Bouvier, J., Matt, S. P., Mohanty, S., et al. 2014, in Protostars and planets VI, eds. B. Henrik, K. Ralf S., P. D. Cornelis, & H. Thomas, 94 [Google Scholar]
- Cuddeford, P. 1993, MNRAS, 262, 1076 [NASA ADS] [Google Scholar]
- Davies, C. L. 2019, MNRAS, 484, 1926 [NASA ADS] [CrossRef] [Google Scholar]
- Dawson, R. I., Murray-Clay, R. A., & Johnson, J. A. 2014, ApJ, 798, 66 [Google Scholar]
- Dong, J., & Foreman-Mackey, D. 2023, AJ, 166, 112 [NASA ADS] [CrossRef] [Google Scholar]
- Fabrycky, D., & Tremaine, S. 2007, ApJ, 669, 1298 [NASA ADS] [CrossRef] [Google Scholar]
- Fielding, D. B., McKee, C. F., Socrates, A., Cunningham, A. J., & Klein, R. I. 2015, MNRAS, 450, 3306 [NASA ADS] [CrossRef] [Google Scholar]
- Ford, E. B., & Rasio, F. A. 2008, ApJ, 686, 621 [Google Scholar]
- Foucart, F., & Lai, D. 2011, MNRAS, 412, 2799 [NASA ADS] [CrossRef] [Google Scholar]
- Fu, T., & Wang, Y. 2024, ApJ, 973, L43 [Google Scholar]
- Fu, T., Wang, Y., & Hu, W. 2025, ApJ, 989, L5 [Google Scholar]
- Hahn, J. M. 2003, ApJ, 595, 531 [NASA ADS] [CrossRef] [Google Scholar]
- Hjorth, M., Albrecht, S., Hirano, T., et al. 2021, PNAS, 118, e2017418118 [NASA ADS] [CrossRef] [Google Scholar]
- Hurt, S. A., & MacGregor, M. A. 2023, ApJ, 954, 10 [NASA ADS] [CrossRef] [Google Scholar]
- Kennedy, G. M., Matrà, L., Facchini, S., et al. 2019, Nat. Astron., 3, 230 [Google Scholar]
- Lai, D. 2014, MNRAS, 440, 3532 [NASA ADS] [CrossRef] [Google Scholar]
- Lai, D., Foucart, F., & Lin, D. N. 2011, MNRAS, 412, 2790 [NASA ADS] [CrossRef] [Google Scholar]
- McLaughlin, D. 1924, ApJ, 60, 22 [NASA ADS] [CrossRef] [Google Scholar]
- Mestel, L. 1963, MNRAS, 126, 553 [NASA ADS] [CrossRef] [Google Scholar]
- Millholland, S., & Batygin, K. 2019, ApJ, 876, 119 [Google Scholar]
- Nagasawa, M., Ida, S., & Bessho, T. 2008, ApJ, 678, 498 [NASA ADS] [CrossRef] [Google Scholar]
- Naoz, S., Farr, W. M., Lithwick, Y., Rasio, F. A., & Teyssandier, J. 2011, Nature, 473, 187 [NASA ADS] [CrossRef] [Google Scholar]
- Petrovich, C., Muñoz, D. J., Kratter, K. M., & Malhotra, R. 2020, ApJ, 902, L5 [NASA ADS] [CrossRef] [Google Scholar]
- Rosenthal, L. J., Knutson, H. A., Chachan, Y., et al. 2022, ApJS, 262, 1 [Google Scholar]
- Rossiter, R. 1924, ApJ, 60, 15 [NASA ADS] [CrossRef] [Google Scholar]
- Schulz, E. 2012, ApJ, 747, 106 [Google Scholar]
- Spalding, C., & Batygin, K. 2015, ApJ, 811, 82 [Google Scholar]
- Spalding, C., & Millholland, S. C. 2020, AJ, 160, 105 [NASA ADS] [CrossRef] [Google Scholar]
- Su, Y., & Lai, D. 2020, ApJ, 903, 7 [Google Scholar]
- Touma, J., Tremaine, S., & Kazandjian, M. 2009, MNRAS, 394, 1085 [NASA ADS] [CrossRef] [Google Scholar]
- Tremaine, S., Touma, J., & Namouni, F. 2009, AJ, 137, 3706 [Google Scholar]
- Vick, M., Su, Y., & Lai, D. 2023, ApJ, 943, L13 [NASA ADS] [CrossRef] [Google Scholar]
- Wang, Y., & Fu, T. 2020, MNRAS, 495, 3307 [Google Scholar]
- Ward, W. R. 1981, Icarus, 47, 234 [NASA ADS] [CrossRef] [Google Scholar]
- Winn, J. N., Fabrycky, D., Albrecht, S., & Johnson, J. A. 2010, ApJ, 718, L145 [Google Scholar]
- Wu, Y., & Lithwick, Y. 2011, ApJ, 735, 109 [Google Scholar]
- Wu, Y., & Murray, N. 2003, ApJ, 589, 605 [Google Scholar]
- Zanazzi, J., & Lai, D. 2018, MNRAS, 478, 835 [NASA ADS] [CrossRef] [Google Scholar]
- Zhu, W., & Dong, S. 2021, ARA&A, 59, 291 [NASA ADS] [CrossRef] [Google Scholar]
- Zink, J. K., & Howard, A. W. 2023, ApJ, 956, L29 [Google Scholar]
All Tables
All Figures
|
Fig. 1 Geometric illustration of a multi-planet system with a misaligned protoplanetary disk. The disk’s angular momentum orientation is denoted by the unit vector |
| In the text | |
|
Fig. 2 Coplanar equilibrium solutions and examples of orbital evolution using the full-space (nonlinear) disk gravity model (a) and the approximate linear model (b). The upper panels of (a) and (b) show equilibrium solutions as a function of ϵ⋆d (or |
| In the text | |
|
Fig. 3 Phase portraits for ψ⋆0 = 70° and ϵ⋆d = 0.1 (a), 1.0 (b), and 10.0 (c) displayed on the unite sphere. These portraits were generated by plotting level curves of the perturbing Hamiltonian from Eq. (20) with |l1| = 1. The orientations of |
| In the text | |
|
Fig. 4 Values of f(ψ1⋆; ψ⋆0, ϵ⋆d) defined by Eq. (23) as functions of ψ1⋆ and ϵ⋆d for ψ⋆0 = 70°. The red and blue curves represent the critical ϵ⋆d that trigger the bifurcations B1 and B2, respectively, which are characterized by f = 0 and df/dψ1⋆ = 0. The two bifurcations are further distinguished by the sign of |
| In the text | |
|
Fig. 5 Bifurcation curves in the (ϵ⋆d, ψ⋆0) space obtained using the bifurcation conditions (Eq. (26)). Curves are shown for three disk softening scales: β = 0.01, 0.02, and 0.05. For β = 0.01, the bifurcation curves of B1 and B2 are in red and blue, respectively. Critical values of ψ⋆0 are also marked. |
| In the text | |
|
Fig. 6 Stability of the circular coplanar equilibria as functions of ψ⋆0 and ψ1⋆ for ψ1⋆ ∈ (0, π/2), calculated using the stability condition, Eq. (32). Blue points represent stable equilibria where λ2 < 0, and yellow points indicate unstable equilibria where λ2 > 0. The red curve presents the bifurcation curve in the (ψ⋆0, ψ1⋆) space, derived from the bifurcation conditions (Eq. (26)). |
| In the text | |
|
Fig. 7 Phase portraits for ψ⋆0 = 70° presented in the (ψ1⋆ cos Δh, ψ1⋆ sin Δh) plane, where Δh represents the difference in the longitudes of the ascending node between the inner and outer orbits. These portraits were generated by plotting level curves of the perturbing Hamiltonian (Eq. (33)). In the upper panels, ϵ⋆p = 10.0 and ϵ⋆d = 0.1, 1.5, and 5.0, respectively. In the lower panels, ϵ⋆p = 1.0 with the same variations in ϵ⋆d. Equilibrium points are indicated with colored markers. The projections of |
| In the text | |
|
Fig. 8 Bifurcation curves for hierarchical systems. (a) Bifurcation curves for several high values of ψ⋆0 presented in the (ϵ⋆d, ϵ⋆p) space. The dashed and solid curves represent the bifurcations B1 and B2, respectively. (b) Bifurcation curves in the (ψ⋆0, ϵ⋆p) space, where the curves for B1 and B2 degenerate into one curve. The softening scale is chosen as β = 0.01. |
| In the text | |
|
Fig. 9 Evolution of orbital inclinations between inner and outer orbits for hierarchical three-body systems obtained by integrating the secular equations for circular orbits. The system parameters are detailed in Table 1. We set the timescale of the disk dissipation (τd) to 1 × 104 yr. In (a), the decay of host stellar oblateness is not considered. In (b), the oblateness of the host star decays due to its radius contraction: R⋆ = R⋆ (0)/(1 + t/τR⋆)−1/3, where τR⋆ = 1 Myr. The temporal evolution of the equilibrium that dominates the planet’s evolution is depicted for each system. Notably, a jump in the equilibrium trajectory signifies an encounter with bifurcation B2. |
| In the text | |
|
Fig. 10 Stability of the coplanar equilibria in the (ψ⋆0, ψ1⋆) space for ϵ⋆p = 5.0, 2.0, and 0.99, respectively. The stable solutions, indicated by λ2 < 0, are marked with blue points, while the unstable solutions, where λ2 > 0, are marked with yellow points. The bifurcation curve corresponding to each value of ϵ⋆p is also depicted. |
| In the text | |
|
Fig. 11 Dynamical evolution of multi-planet systems from Table 2. Each column displays the evolution of stellar obliquities and mutual planetary inclinations for a system under two distinct initial stellar obliquity angles (ψ⋆0). The magenta curves in each obliquity panel represent the evolution paths of equilibria. Note that in all simulations, we ignore the evolution of the eccentricity vectors by assuming all the orbits are initially circular. In addition to the parameters given in Table 2, other integration parameters are: m⋆ = 1M⊙, τd = 1 × 104 yr, rin = 0.03 au, and rout = 50 au. The disk mass (md) is set to 0.05M⊙ for Cases I-III and to 0.02M⊙ for Case V, respectively. |
| In the text | |
|
Fig. 12 Estimations of ϵ⋆p,1 as a function of a1 for typical compact multi-planet systems. This figure displays estimations of ϵ⋆p,1 for three-planet systems with uniform planetary masses of m1-m3 = 5m⊕ and varying orbital separations δa = {16, 20, 25, 30} RH. Two sets of stellar parameters, resulting in J2 = 7.97 × 10−4 and J2 = 1.46 × 10−4, respectively, are adopted. The selection of δa= 16RH represents the minimum spacing required for these systems to maintain stability over 1 Gyr (Zhu & Dong 2021). The grade-shaded histogram (presented using the right y-axis) illustrates the distribution of a1 for the Kepler sample of multi-planet systems, which are retrieved from the NASA Exoplanet Archive. |
| In the text | |
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.